Lidar Slam Algorithm
Map Comparison of Lidarbased 2D SLAM Algorithms Using Precise Ground Truth November 18;.
Lidar slam algorithm. In this video, we prototype the SLAMTEC RPLIDAR M8!Using a TurtleBot and the Hector SLAM algorithm, we can see that the hallway has been mapped perfectly. Test Matlab 2D Lidar SLAM algorithm on simulator data GPL30 License 1 star 0 forks Star Watch Code;. The method of simultaneous localization and mapping (SLAM) using a light detection and ranging (LiDAR) sensor is commonly adopted for robot navigation However, consumer robots are price sensitive.
SLAM uses devices/sensors to collects visible data (camera) and/or nonvisible data (RADAR, SONAR, LiDAR) with basic positional data collected using Inertial Measurement Unit (IMU) Together these sensors collect data and build a picture of the surrounding environment The SLAM algorithm helps to best estimate the location/position within the surrounding environment. RBPFSLAM algorithms (C library mrptslam) Sparser Relative Bundle Adjustment (SRBA) SLAM Map types vs algorithms Not all SLAM algorithms fit any kind of observation (sensor data) and produce any map type The following table summarizes what algorithms (of those implemented in MRPT) fit what situation. SLAM algorithms combine data from various sensors (eg lidar, IMU, and cameras) to simultaneously compute the position of the sensor and a map of the sensor’s surroundings SLAM is an essential component of autonomous platforms such as selfdriving cars, automated forklifts in warehouses, robotic vacuum cleaners, and UAVs.
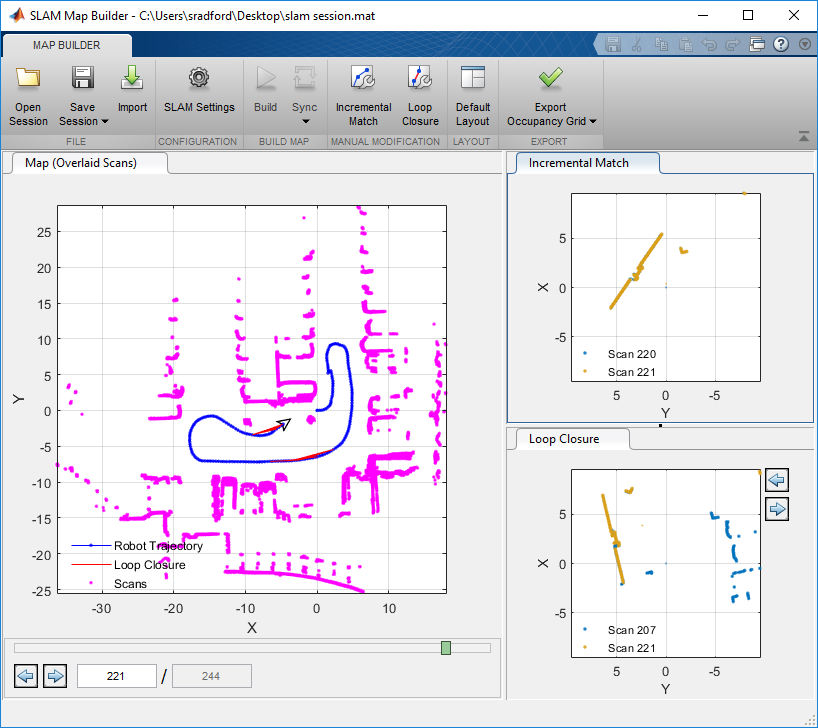
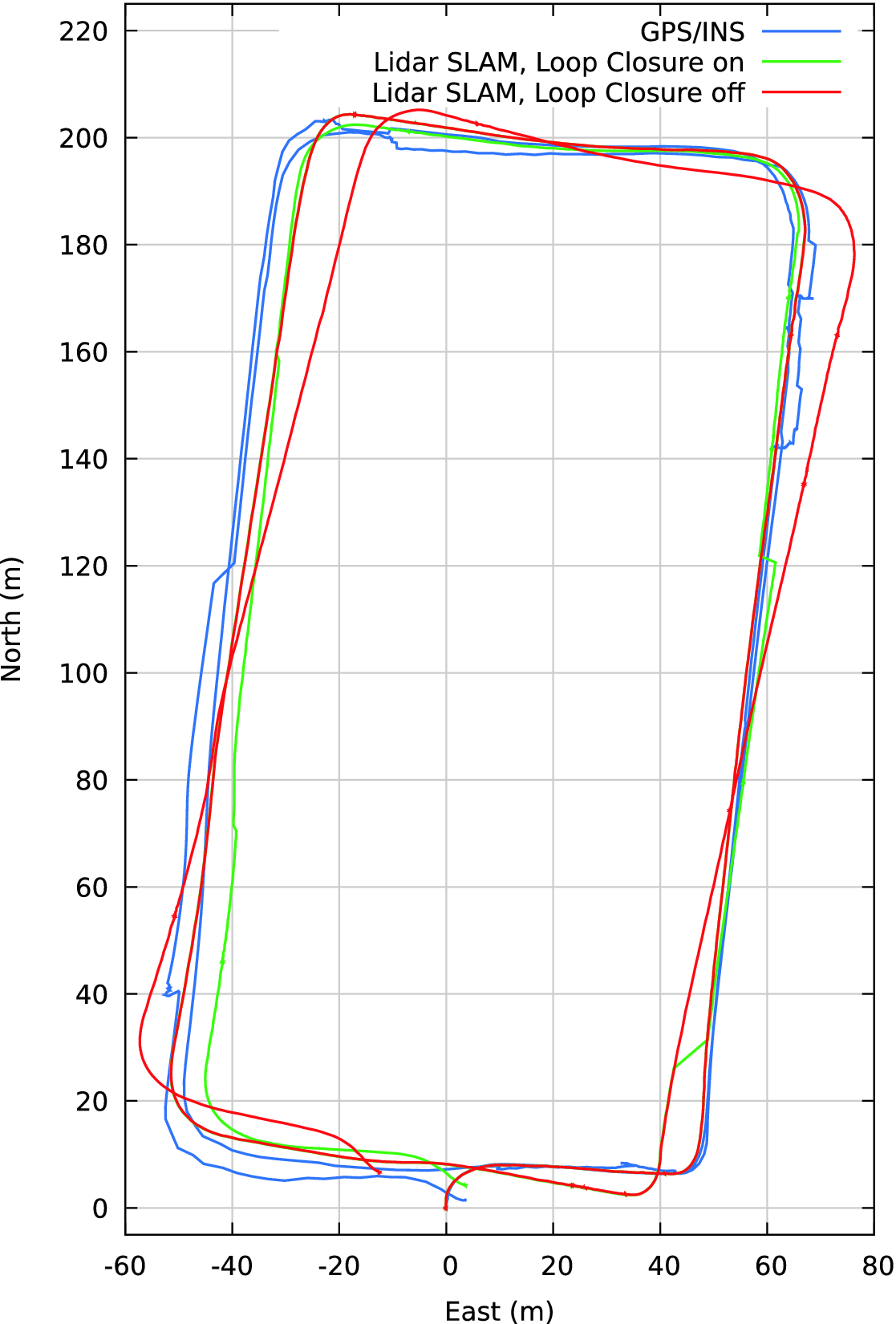
Solutions to the SLAM problem using Light Detection and Ranging (LiDAR), but these algorithms require a high computational cost However, certain environments with a specific structure allow the use of more simplified algorithms Specifically, this paper shows a SLAM algorithm where only the LiDAR signal is used and vertical planes are taken as. The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map. Basic algorithms for lidar slam Contribute to ydsf16/lidar_slam development by creating an account on GitHub.
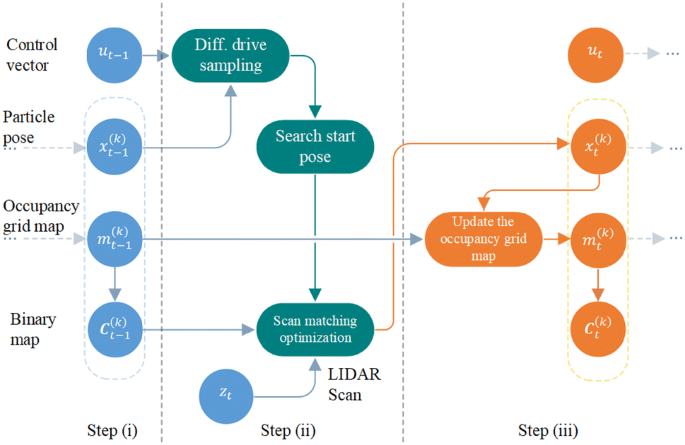
Introduction¶ FastSLAM algorithm implementation is based on particle filters and belongs to the family of probabilistic SLAM approaches It is used with featurebased maps (see gif above) or with occupancy grid maps. Viomi V3 Review – I’m still in love with the Viomi Smart 11 vacuum bot (check my review out) but it is obvious that the new Viomi V3 (VRVCLM26B) is much smarter and better in many ways For example, the V3 is equipped with LDS laser navigation (LIDAR) and SLAM (Simultaneous Localisation And Mapping) algorithm which means the unit can map out the interior of your house (rooms and walls. SLAM algorithms use LiDAR and IMU data to simultaneously locate the sensor and generate a coherent map of its surroundings Companies like GeoSLAM use the same technology, but different algorithms, to power their own indoor scanning solutions As Google notes, these kinds of algorithms are a crucial part of many cuttingedge technologies.
The trajectory of the robot is a collection of its poses which consists of its location and orientation in 3D space Estimate a robot pose from a 3D lidar scan instance using the 3D lidar SLAM algorithm Use these processes to perform 3D SLAM estimation. The trajectory of the robot is a collection of robot poses (location and orientation in 3D space) A robot pose is estimated at every 3D lidar scan acquisition instance using the 3D lidar SLAM algorithm The 3D lidar SLAM algorithm has the following steps. Dismiss Join GitHub today GitHub is home to over 50 million developers working together to host and review code, manage projects, and build software together.
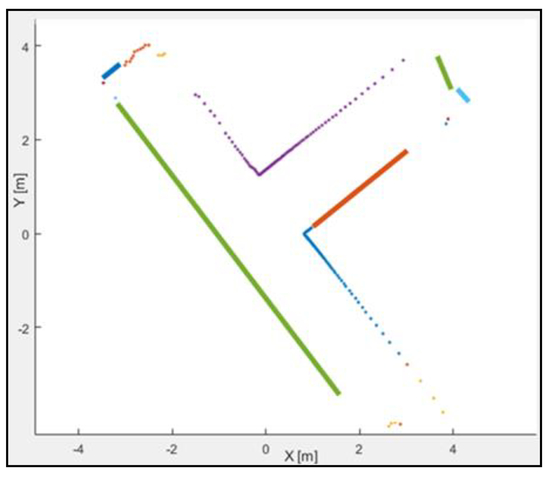
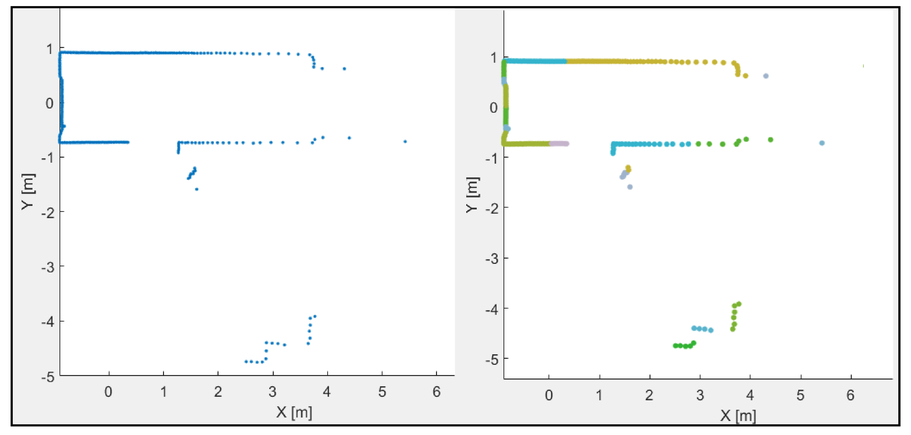
After properly performed point cloud clustering, the SLAM algorithm proceeds to identification of shapes among obtained clusters The algorithm detects straight lines and corners (Lshapes) If a given cluster cannot be assigned to any of these two categories, it is left unprocessed for further analysis. In computational geometry and robotics, simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it While this initially appears to be a chickenandegg problem there are several algorithms known for solving it, at least approximately, in tractable time. A SLAM algorithm performs complex calculations to align lidar points Processing Speed A SLAM algorithm makes an astounding number of calculations each second It tracks your movement through a space using data fed by a number of sensors, and then fuses that sensor data to align the millions of measurements captured by the lidar.
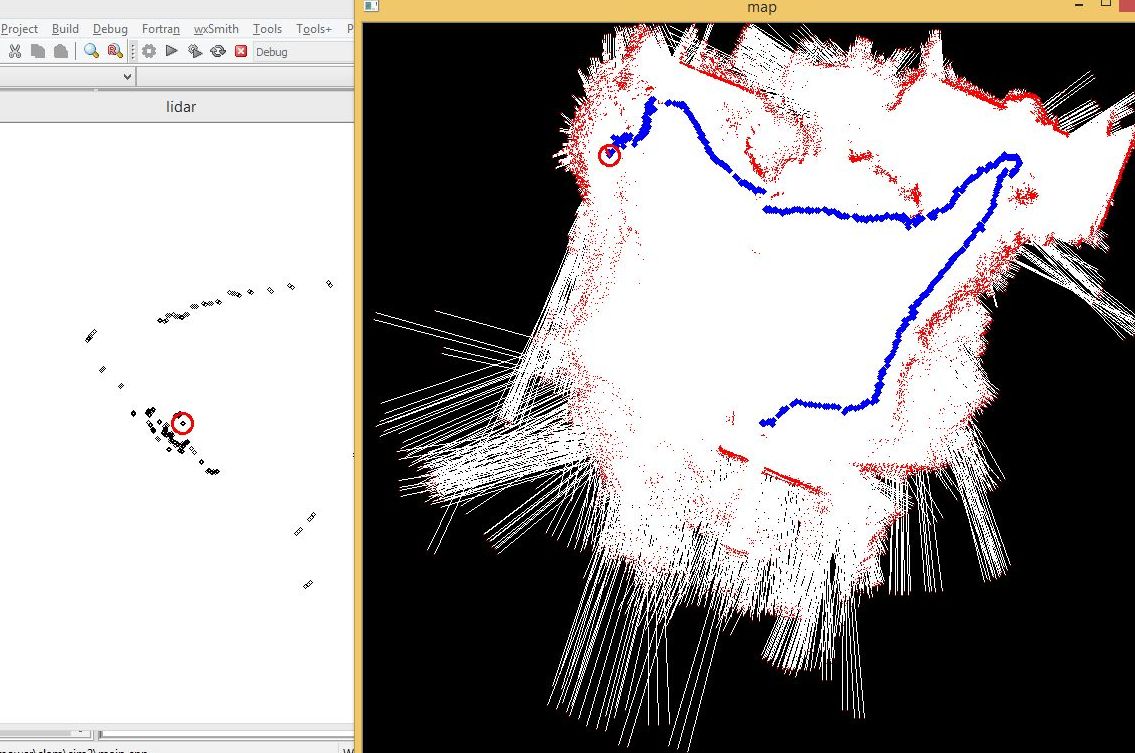
Simulate the model to record synthetic lidar data generated by the sensor and save it to the workspace Use the sensor data saved to the workspace to develop a perception algorithm in MATLAB The perception algorithm builds a map of the surroundings using SLAM Visualize the results of the built map. The rplidar A1 singleline lidar was used for 2D laser scan matching data acquisition in the practical experiments and the indoor map was built by using the open source algorithms gmapping, karto SLAM, hector SLAM software package for indoor SLAM, which can get the indoor grid maps in ROS graphical tool RVIZ. This is called simultaneous localization and mapping (SLAM) Previously, computers weren’t fast enough to run SLAM reliably with lidar data, but recent developments in SLAM techniques, as well as faster computer hardware, have now made it possible The principle of SLAM is The best explanation of your sensor data is the simplest one.
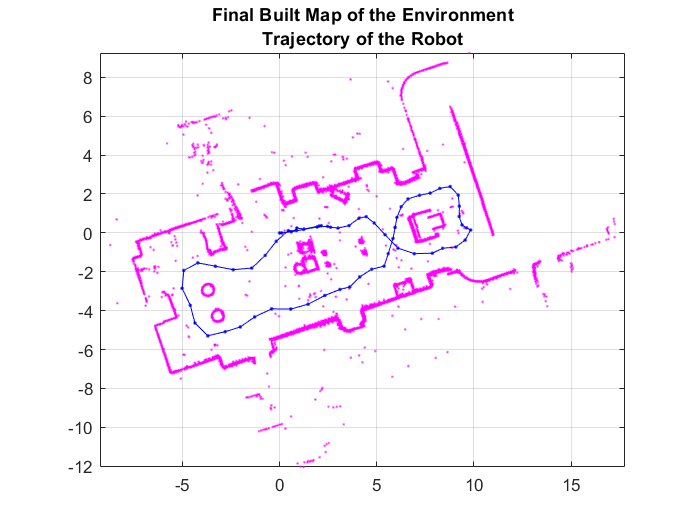
The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot, with the robot simulator in the loop The basics of SLAM algorithm can be found in the Implement Simultaneous Localization And Mapping (SLAM) with Lidar Scans example. LiDARbased Simultaneous Localization And Mapping (SLAM), which provides environmental information for autonomous vehicles by map building, is a major challenge for autonomous driving In addition, the semantic information has been used for the LiDARbased SLAM with the advent of deep neural networkbased semantic segmentation algorithms. Matching Scans To A Persistent Map;.
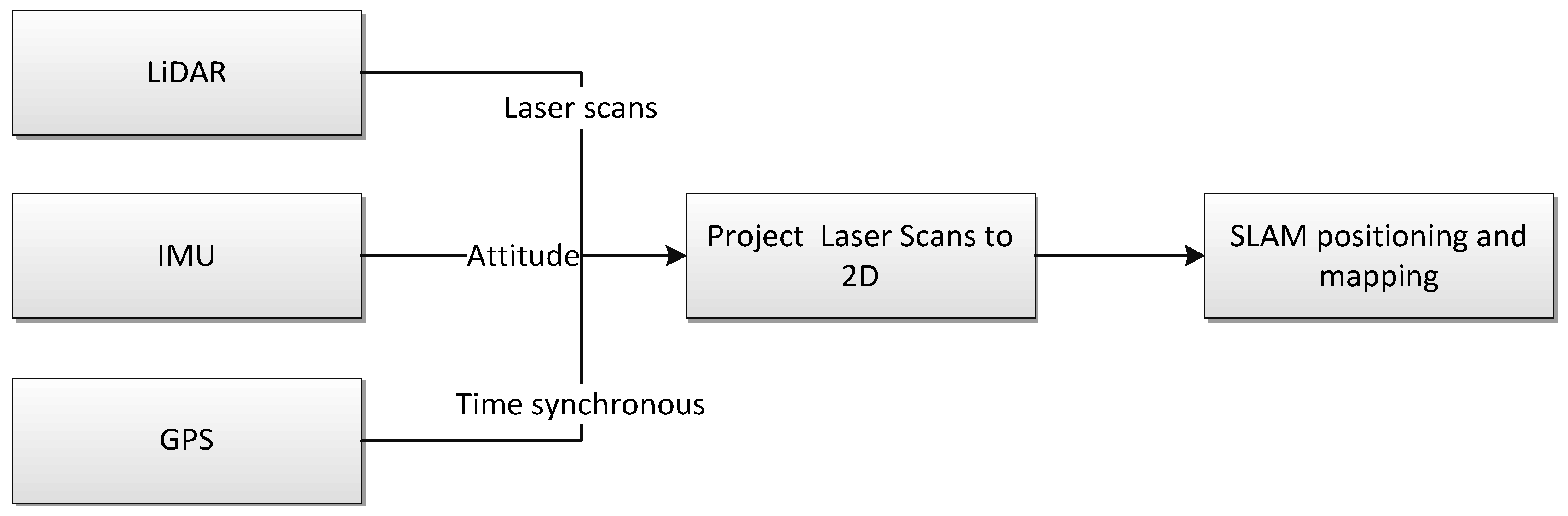
Viomi V3 Review – I’m still in love with the Viomi Smart 11 vacuum bot (check my review out) but it is obvious that the new Viomi V3 (VRVCLM26B) is much smarter and better in many ways For example, the V3 is equipped with LDS laser navigation (LIDAR) and SLAM (Simultaneous Localisation And Mapping) algorithm which means the unit can map out the interior of your house (rooms and walls. LiDAR mapping uses a laser scanning system with an integrated Inertial Measurement Unit (IMU) and GNSS receiver or in GeoSLAM’s case, the SLAM algorithm, which allows each measurement, or point in the resulting point cloud, to be georeferenced Each ‘point’ combines to create a 3D representation of the target object or area. DOI /ICARCV Visionbased simultaneous localization and mapping (vSLAM) is a.
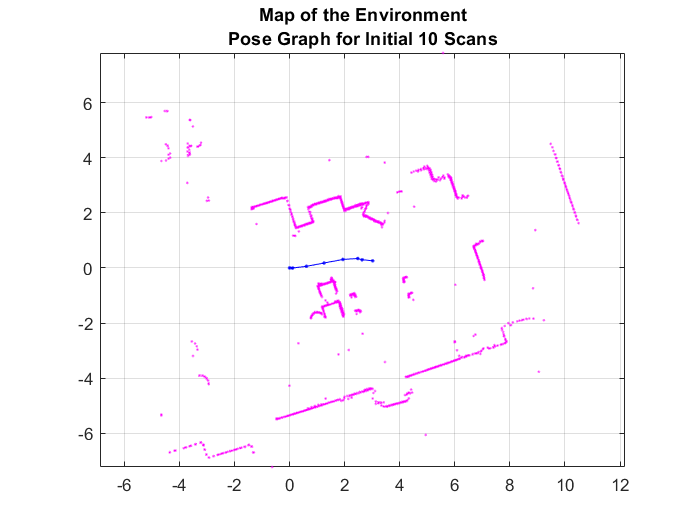
Autonomous UAV, 3D Mapping without drift, using a Drone and a Velodyne Lidar with Dibotics 6DOF Slam algorithms in an Urban environment Thanks to a close collaboration between Dibotics and XactSense (wwwxactSensecom). This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on a collected series of lidar scans using pose graph optimization The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot. Dismiss Join GitHub today GitHub is home to over 50 million developers working together to host and review code, manage projects, and build software together.
The lidarSLAM class performs simultaneous localization and mapping (SLAM) for lidar scan sensor inputs. To get the full story when researching handheld Lidar scanners, you also need to compare the SLAM algorithms These three criteria will help you processing speed, sensor integration and colorization. This post is the second in a series of tutorials on SLAM using scanning 2D LIDAR and wheel odometry The other posts in the series can be found in the links below The links will be updated as work on the series progresses Intro To LIDAR SLAM and the IRC Dataset;.
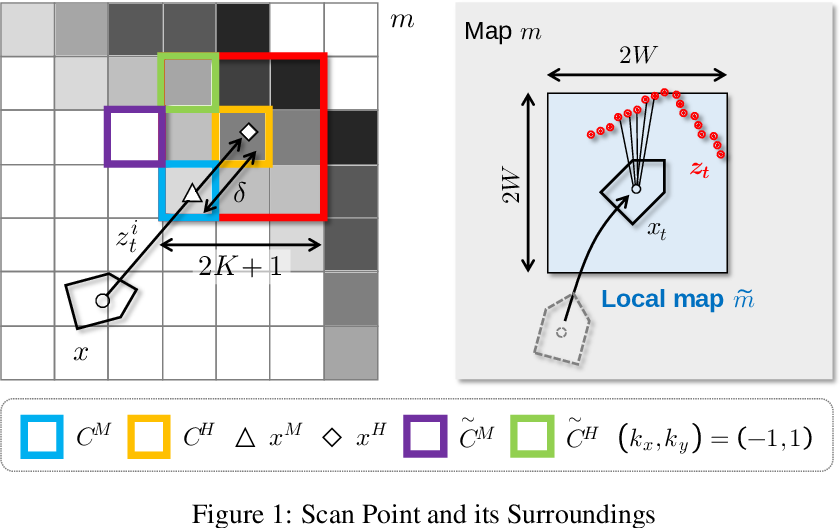
RealTime Loop Closure in 2D LIDAR SLAM Wolfgang Hess 1, Damon Kohler , Holger Rapp , Daniel Andor1 Abstract—Portable laser rangefinders, further referred to as LIDAR, and simultaneous localization and mapping (SLAM) are an efficient method of acquiring asbuilt floor plans Generating and visualizing floor plans in realtime helps the. This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on a collected series of lidar scans using pose graph optimization The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot. As scan matching algorithm, only filtering based on the endpoint z coordinates is enough, so „only endpoints within a threshold of the intended scan plane are used in the scan matching process“ This process is known as FastSLAM Fig 3 Fast SLAM hdl_graph_slam is an open source ROS package for realtime 3D slam using a 3D LIDAR It is.
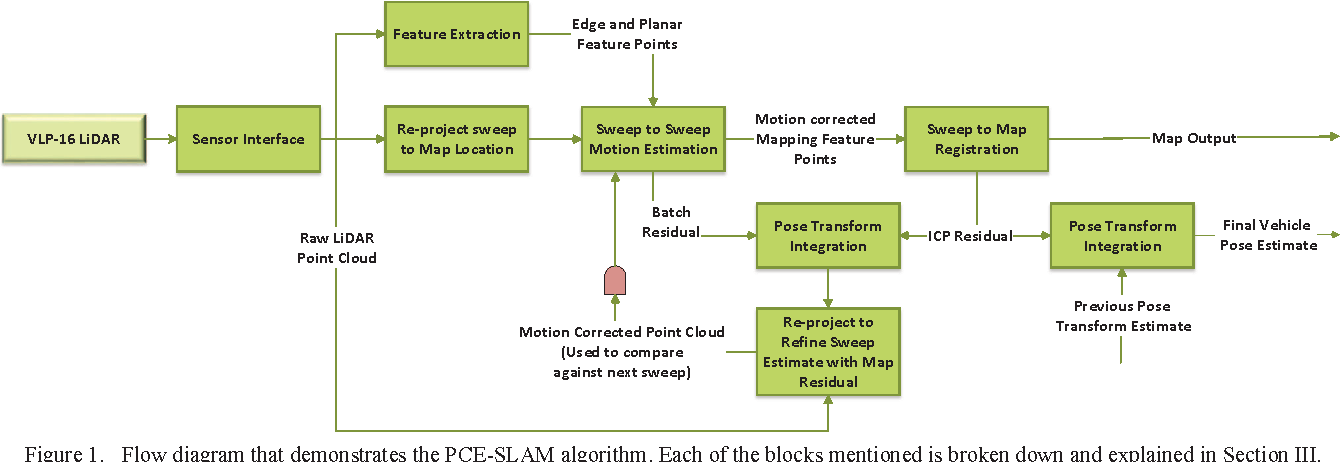
Visual SLAM algorithms can be broadly classified into two categories Sparse methods match feature points of images and use algorithms such as PTAM and ORBSLAM Dense methods use the overall brightness of images and use algorithms such as DTAM, LSDSLAM, DSO, and SVO Structure from motion. We propose a realtime method for odometry and mapping using range measurements from a 2axis lidar moving in 6DOF The problem is hard because the range measurements are received at different times, and errors in motion estimation can cause misregistration of the resulting point cloud To date, coherent 3D maps can be built by offline. It is suitable for nonlinear and nonGaussian systems With multiple experimental tests of real scenes, it is verified that the accuracy of the algorithm proposed in this paper has been improved relative to the alone Lidar SLAM algorithm.
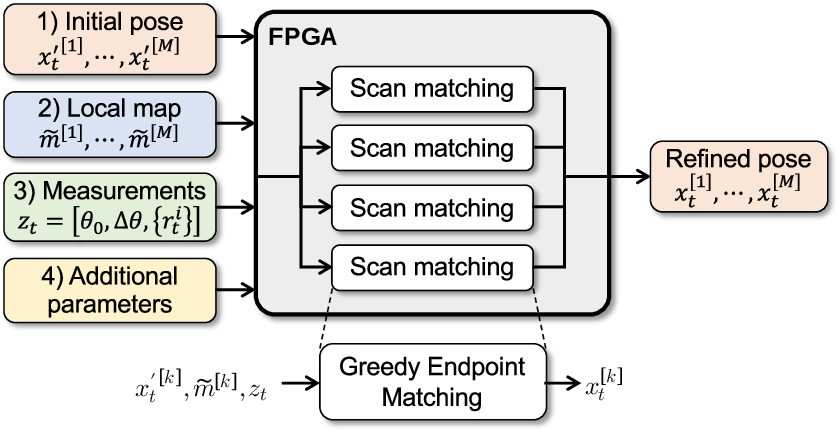
124 FPGA SLAM 0616AN FPGA ACCELERATION AND OPTIMIZATION TECHNIQUES FOR 2D LIDAR SLAM ALGORITHM 125 Math 0616Least Squares Optimization from Theory to Practice 126 VSLAM 0616PlugandPlay SLAM A Unified SLAM Architecture for Modularity and Ease of Use 127. SLAM Using LIDAR And Wheel Odometry. Time constraints Unlike the approach in 25, LIMO does not use any LIDARSLAM algorithms such as Iterative Closest Point (ICP) The major drawback of LIMO is that it has many parameters, which needs to be manually tuned LIMO suffers from translation and rotation errors even more than existing algorithms.
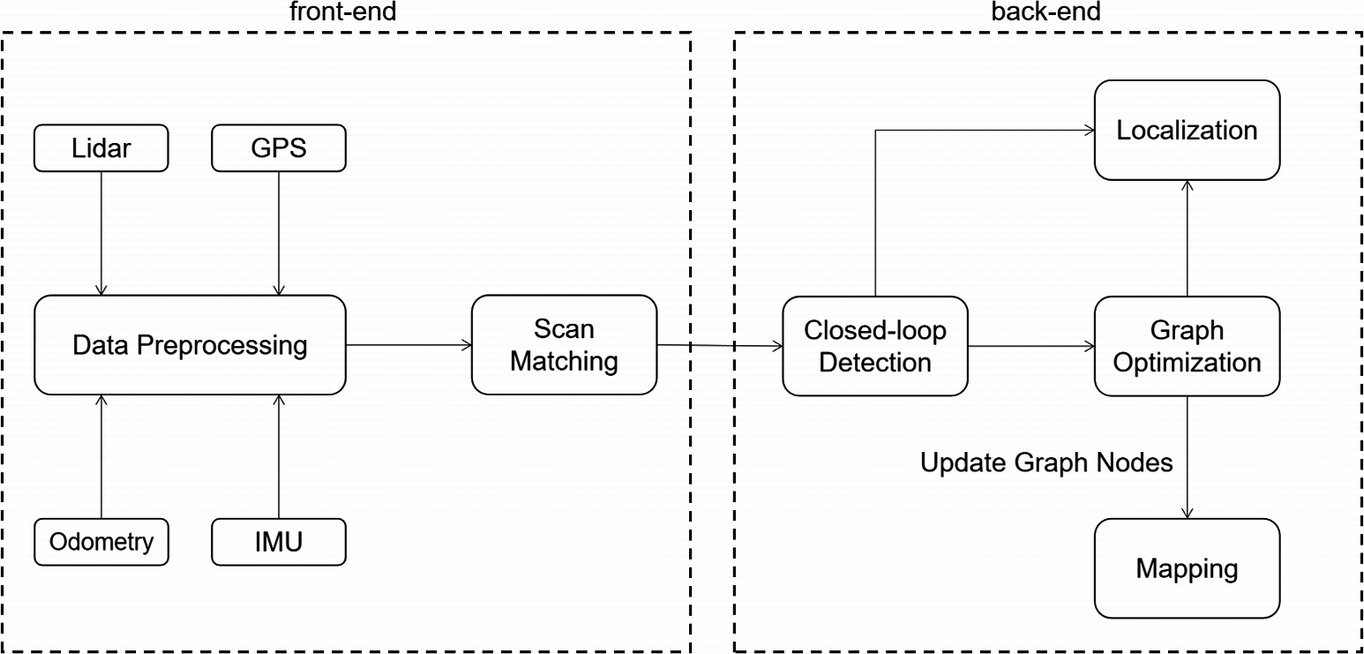
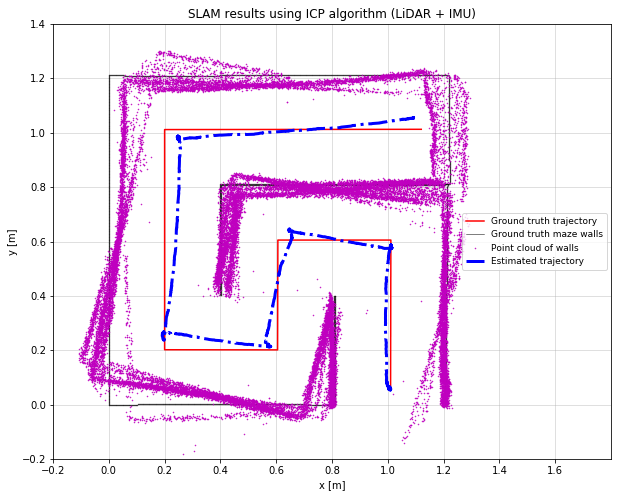
Use Recorded Data to Develop Perception Algorithm The synthetic lidar sensor data can be used to develop, experiment with, and verify a perception algorithm in different scenarios This example uses an algorithm to build a 3D map of the environment from streaming lidar data Such an algorithm is a building block for applications like localization. To build the map of the environment, the SLAM algorithm incrementally processes the lidar scans and builds a pose graph that links these scans The robot recognizes a previouslyvisited place through scan matching and may establish one or more loop closures along its moving path. The rplidar A1 singleline lidar was used for 2D laser scan matching data acquisition in the practical experiments and the indoor map was built by using the open source algorithms gmapping, karto SLAM, hector SLAM software package for indoor SLAM, which can get the indoor grid maps in ROS graphical tool RVIZ.
As the basic system of the rescue robot, the SLAM system largely determines whether the rescue robot can complete the rescue mission Although the current 2D Lidarbased SLAM algorithm, including its application in indoor rescue environment, has achieved much success, the evaluation of SLAM algorithms combined with path planning for indoor rescue has rarely been studied. A SLAM algorithm makes an astounding number of calculations each second It tracks your movement through a space using data fed by a number of sensors, and then fuses that sensor data to align the millions of measurements captured by the Lidar. SLAM algorithms use LiDAR and IMU data to simultaneously locate the sensor and generate a coherent map of its surroundings Companies like GeoSLAM use the same technology, but different algorithms, to power their own indoor scanning solutions As Google notes, these kinds of algorithms are a crucial part of many cuttingedge technologies.
The trajectory of the robot is a collection of robot poses (location and orientation in 3D space) A robot pose is estimated at every 3D lidar scan acquisition instance using the 3D lidar SLAM algorithm The 3D lidar SLAM algorithm has the following steps. 2D Lidar SLAM Implement Simultaneous Localization and Mapping (SLAM) algorithms from 2D lidar scans Estimate positions and create binary or probabilistic occupancy grids using real or simulated sensor readings. SLAM, as discussed in the introduction to SLAM article, is a very challenging and highly researched problemThus, there are umpteen algorithms and techniques for each individual part of the problem SLAM needs high mathematical performance, efficient resource (time and memory) management, and accurate software processing of all constituent subsystems to successfully navigate a robot through.
This post is the second in a series of tutorials on SLAM using scanning 2D LIDAR and wheel odometry The other posts in the series can be found in the links below The links will be updated as work on the series progresses Intro To LIDAR SLAM and the IRC Dataset;. Test Matlab 2D Lidar SLAM algorithm on simulator data GPL30 License 1 star 0 forks Star Watch Code;. Use Recorded Data to Develop Perception Algorithm The synthetic lidar sensor data can be used to develop, experiment with, and verify a perception algorithm in different scenarios This example uses an algorithm to build a 3D map of the environment from streaming lidar data Such an algorithm is a building block for applications like localization.
The method of simultaneous localization and mapping (SLAM) using a light detection and ranging (LiDAR) sensor is commonly adopted for robot navigation However, consumer robots are price sensitive. This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on a collected series of lidar scans using pose graph optimization The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot. All of GeoSLAM’s mapping technology, from 13’s ZEB1 (the world’s first SLAMbased mobile mapping system) through to the new ZEBHORIZON, feature our improved SLAM algorithm at their core Our products use Lidar (Light Detection and Ranging) sensors, which emit multiple pulses of laser light per second.
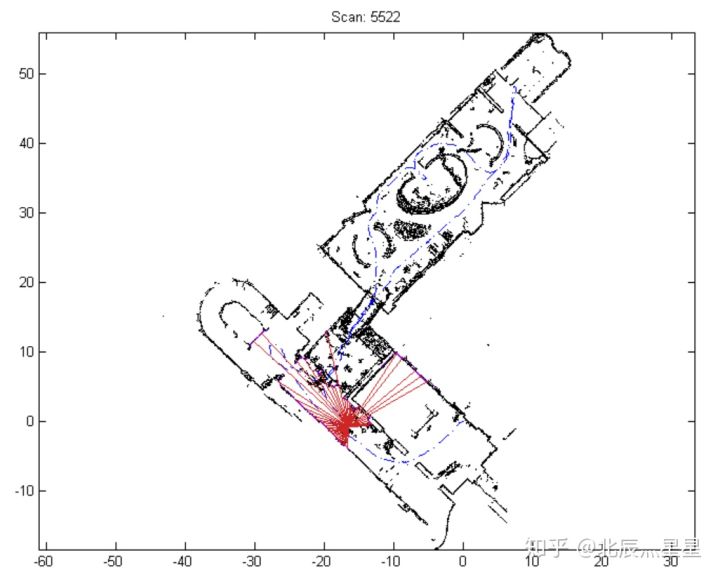
SLAM Algorithms for Handheld Lidar?. The Hector SLAM algorithm, developed by Kohlbrecher et al , was adopted in this study to perform laser scan matching between the current LiDAR scan and an incrementallybuilt map to obtain a pose estimate and a planar map of the environment The SLAM algorithm is carried out as shown in Fig 3. Map Comparison of Lidarbased 2D SLAM Algorithms Using Precise Ground Truth November 18;.
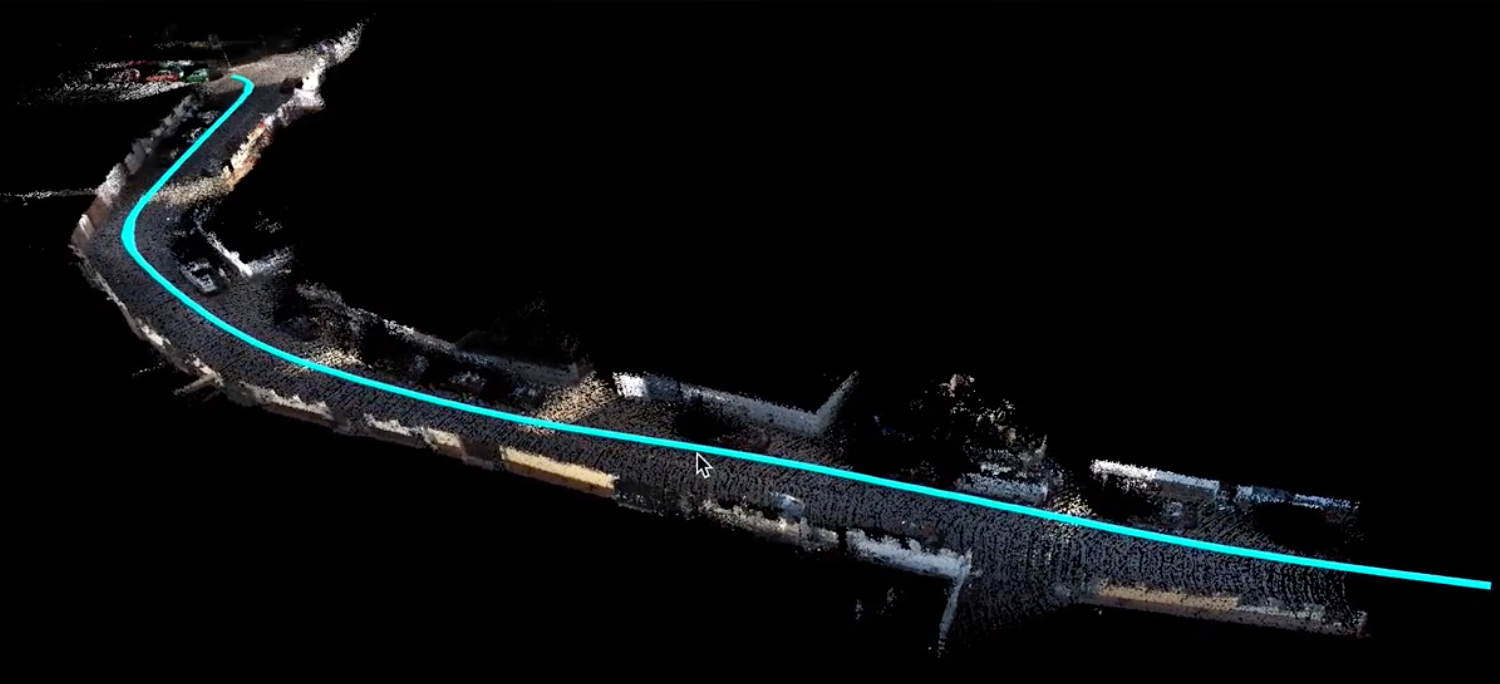
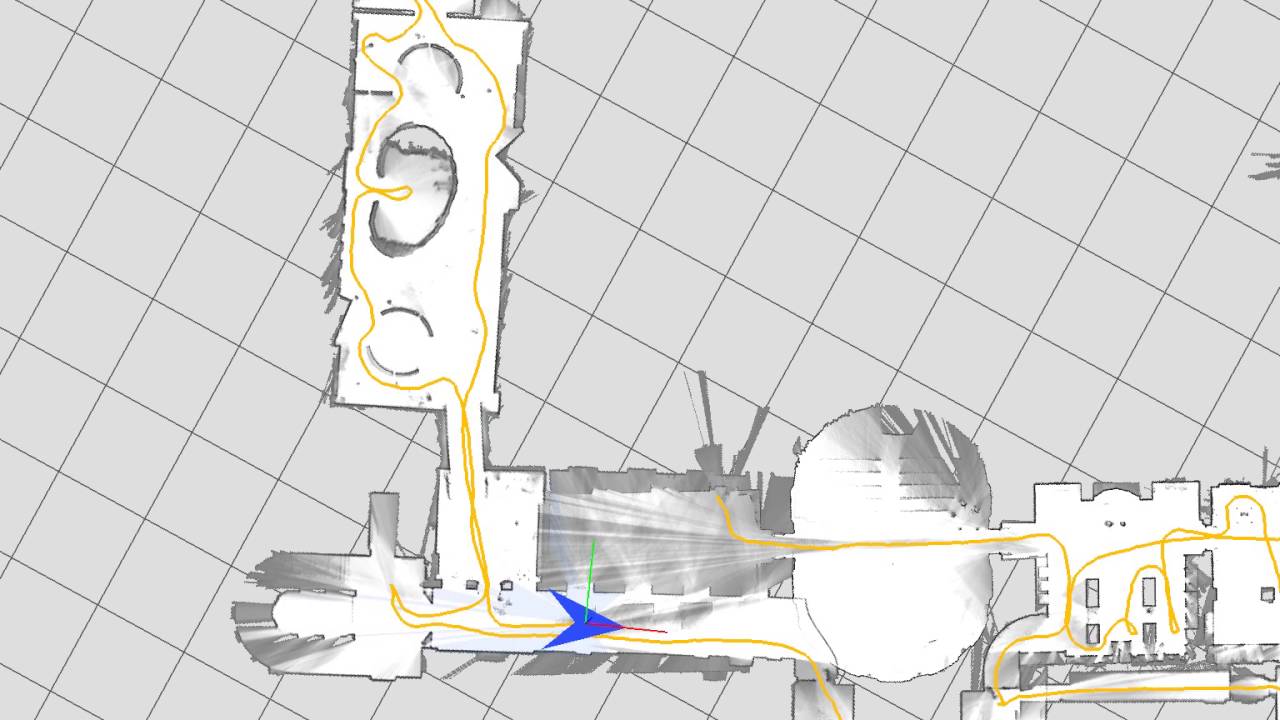
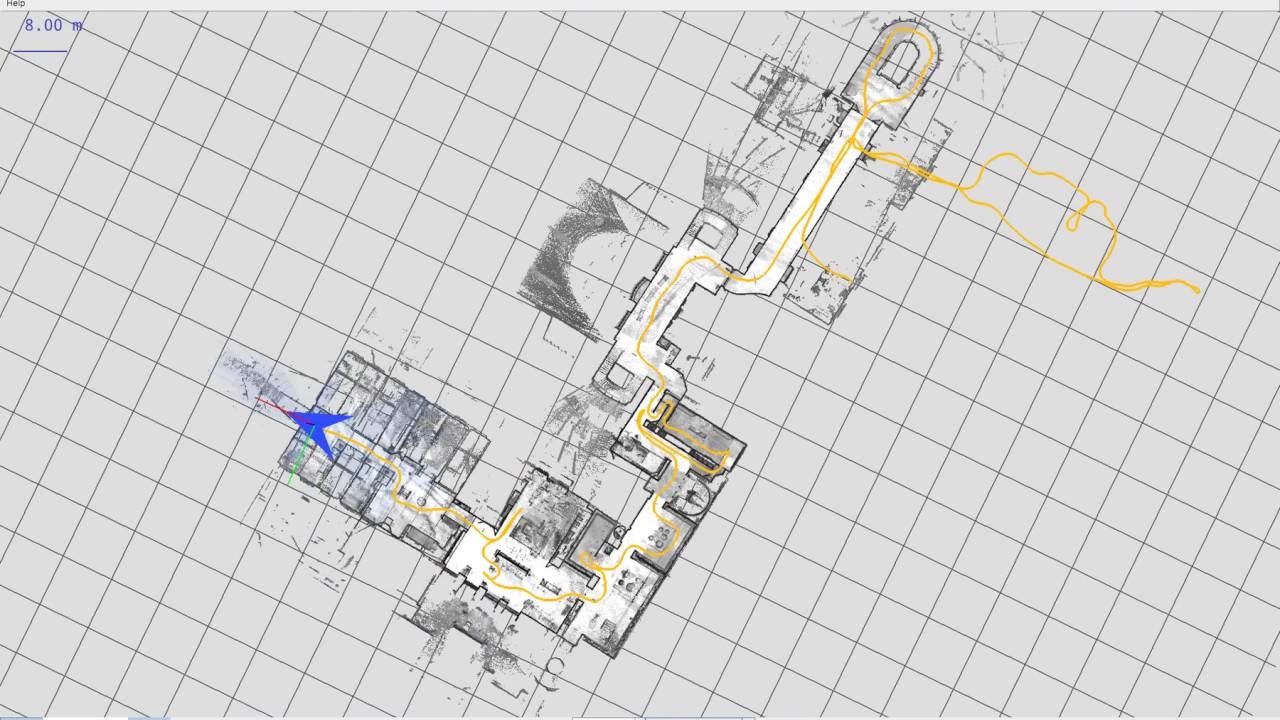
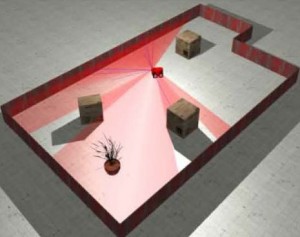
Matching Scans To A Persistent Map;. DOI /ICARCV Visionbased simultaneous localization and mapping (vSLAM) is a. This is example output from a SLAM (Simultaneous Location And Mapping) algorithm that I helped write that uses data from a planar LIDAR (a device that finds.
This example demonstrates how to implement the Simultaneous Localization And Mapping (SLAM) algorithm on a collected series of lidar scans using pose graph optimization The goal of this example is to build a map of the environment using the lidar scans and retrieve the trajectory of the robot. Basic algorithms for lidar slam Contribute to ydsf16/lidar_slam development by creating an account on GitHub. SLAM algorithms combine data from various sensors (eg LIDAR, IMU and cameras) to simultaneously compute the position of the sensor and a map of the sensor’s surroundings For example, consider this approach to drawing a floor plan of your living room Grab a laser rangefinder, stand in the middle of the room, and draw an X on a piece of paper.
In this video, we prototype the SLAMTEC RPLIDAR M8!Using a TurtleBot and the Hector SLAM algorithm, we can see that the hallway has been mapped perfectly. All SLAM algorithms are ultimately based on sensor readings of the environment When no objects are in a suitable placement to be read by the sensors, as seen with an empty shelf in a warehouse and a 2D lidar at that exact height, the introduction of 3D lidar or 3D stereo depth camerabased sensing can greatly add to localization performance. SLAM Using LIDAR And Wheel Odometry.
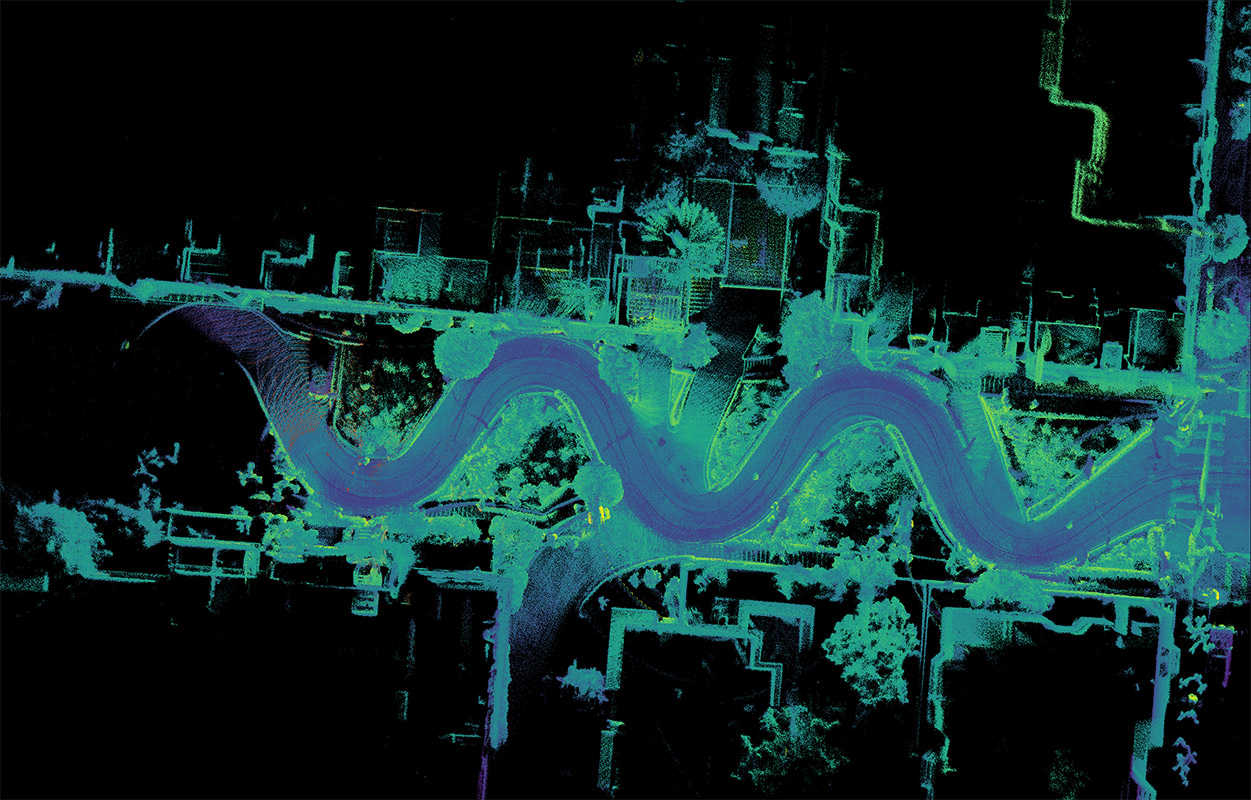
The trajectory of the robot is a collection of robot poses (location and orientation in 3D space) A robot pose is estimated at every 3D lidar scan acquisition instance using the 3D lidar SLAM algorithm The 3D lidar SLAM algorithm has the following steps. Kitware based their developments on a stateoftheart algorithm 1 The main goal of SLAM is to construct and update a map of an unknown environment while simultaneously keeping track of the LiDAR’s location within it Velodyne’s Lidar sensors capture a full 360° 3D scan, up to times per second Each scan holds 16/32/64 scanlines.

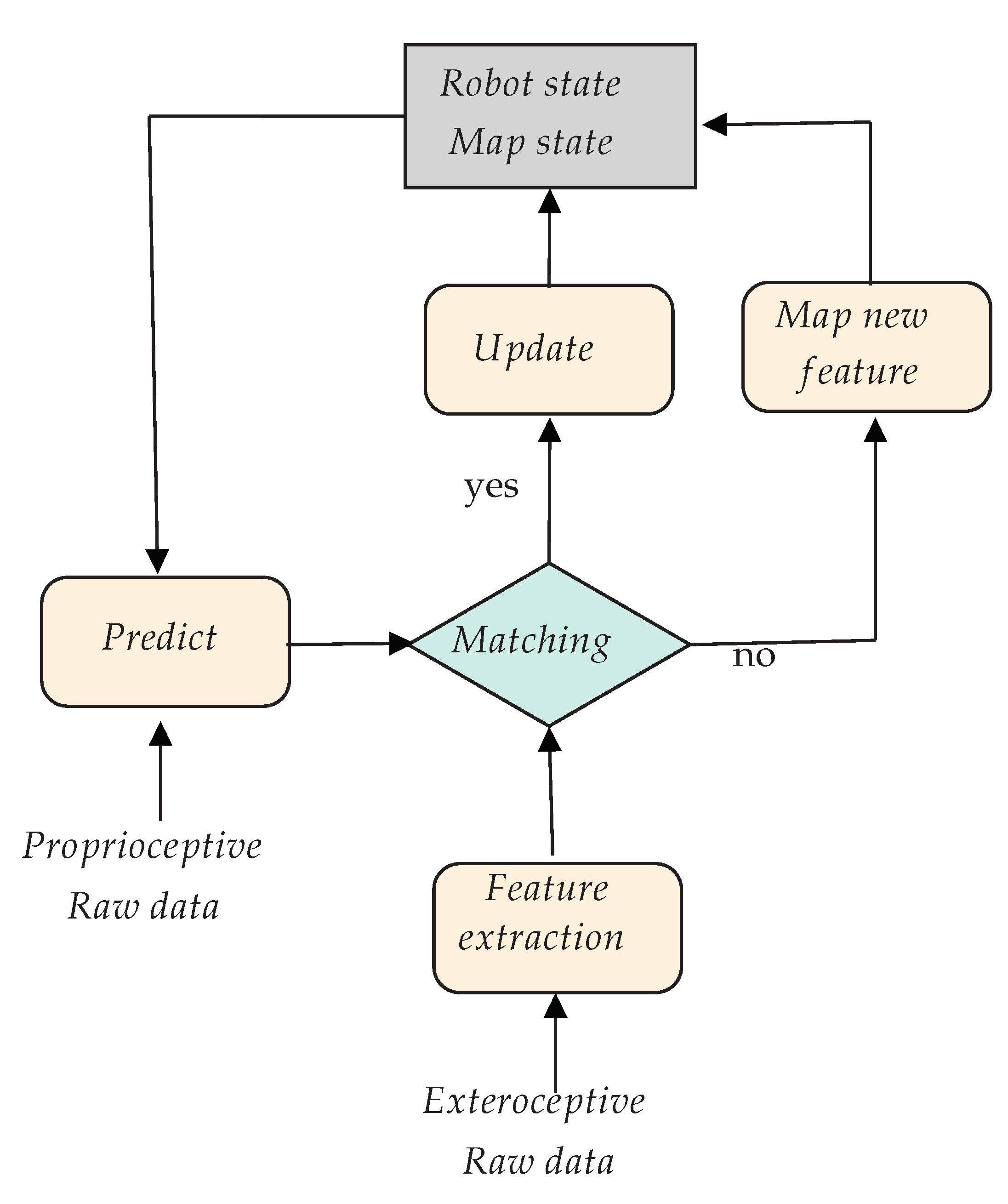
Pf Slam Algorithm Flow Chart Based On Lidar Download Scientific Diagram

Slam Assisted Coverage Path Planning For Indoor Lidar Mapping Systems
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing
Lidar Slam Algorithm のギャラリー

An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai
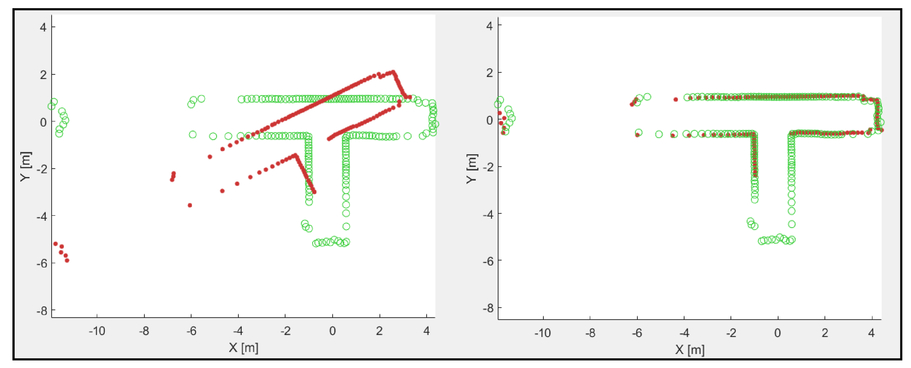
I Developed A 2d Lidar Slam Using Matlab

Velodyne Lidar Announces Agreement With Dibotics Targeting Drone Mapping And Mobile Robotics Gisuser Com
Http Www Diva Portal Org Smash Get Diva2 Fulltext01 Pdf
A Quantitative Analysis On Gmapping Algorithm Parameters Based On Lidar In Small Area Environment Springerlink
Http Www Remedypublications Com Open Access A Survey Of Slam Research Based On Lidar Sensors 4870 Pdf

An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai
360 Smart Network S9 Robot Vacuum And Mop W Lidar Navigation And Slam 360rcs9usa Buydig Com
Repository Lib Ncsu Edu Bitstream 1840 1 Etd Pdf

360 S6 Robot Vacuum Cleaner 1800pa Suction Mopping Sweeping Mode App Remote Control Lds Lidar Slam Algorithm Overstock

Differences In Handheld Lidar Slam Algorithms Geo Matching Com

Lidar Slam Robot Car Ros 01
Flow Chart Of Position Control Program This Design Uses Slam Algorithm Download Scientific Diagram
What S The Difference Between Slam Algorithms For Handheld Lidar Geo4construction
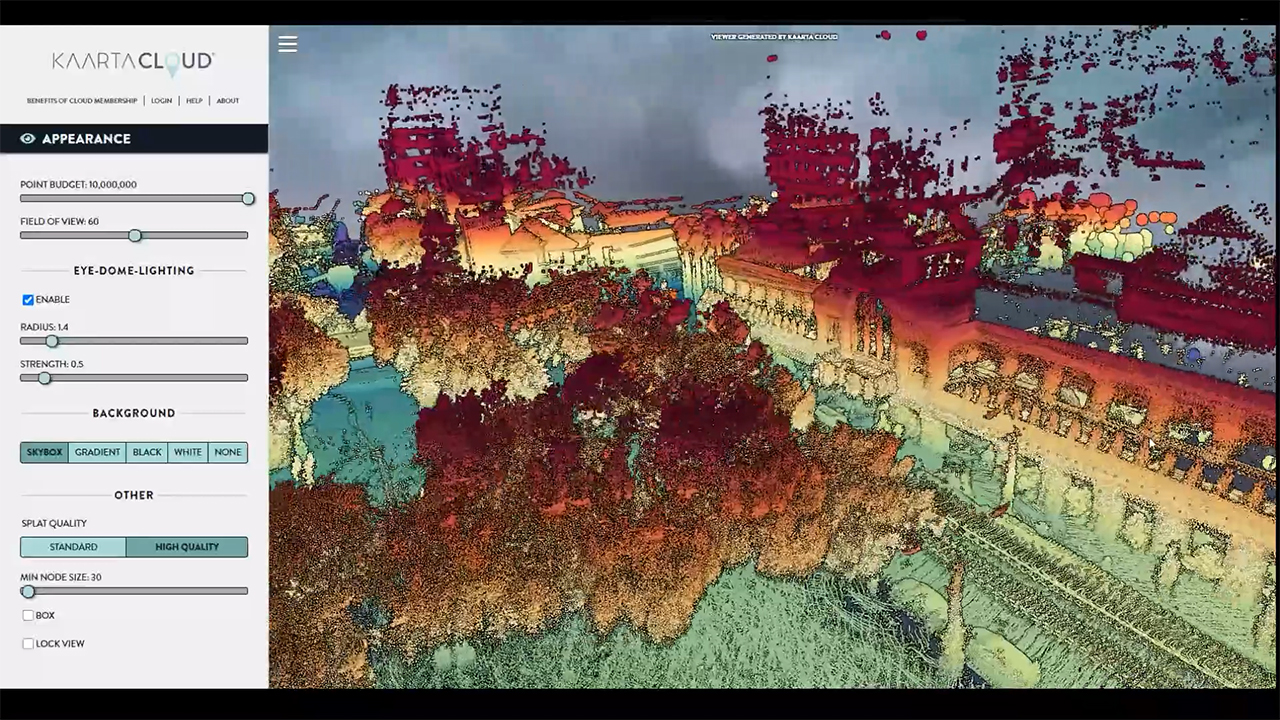
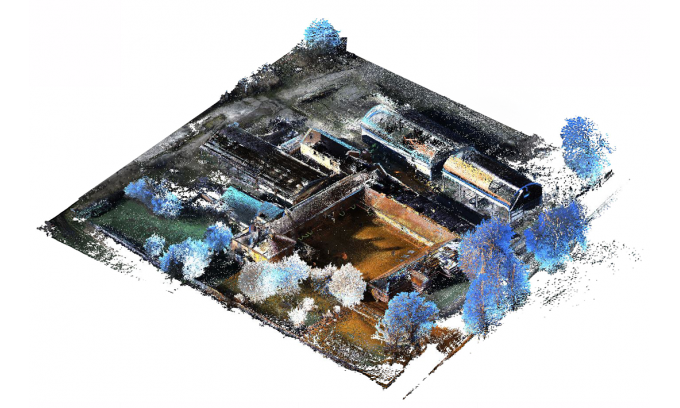
Velodyne Lidar With Kaarta Cloud Can Produce Stunning 3d Maps Business Wire
Feature Article Products Related To Slam Technology Visual Slam Lidar Slam Tegakari An Information Transmission Media For Research And Development

360 S6 Robot Vacuum Cleaner 1800pa Suction Mopping Sweeping Mode App Remote Control Lds Lidar Slam Algorithm Overstock

What Is Slam Geoslam
What Is Slam Algorithm And Why Slam Matters Gis Resources

360 S6 Robot Vacuum Cleaner 1800pa Suction Mopping Sweeping Mode App Remote Control Lds Lidar Slam Algorithm Walmart Com Walmart Com

Slam Technology And Lidar Tests By Flytech Uav Youtube

Lidar Only Slam Algorithm Youtube

What S The Difference Between Slam Algorithms For Handheld Lidar
Q Tbn And9gcqi3mfw4hgk6r8w1lffbbbyjkbsiomlfnbcrs1eweyobuaewvk8 Usqp Cau
Pdf An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Semantic Scholar

Lidar Based Simultaneous Localization And Mapping Slam

Accelerating 2d Lidar Slam Algorithm On Pynq Z2 Fpga Board Youtube
Pce Slam A Real Time Simultaneous Localization And Mapping Using Lidar Data Semantic Scholar

Simultaneous Localization And Mapping Wikipedia
What Is Slam Algorithm And Why Slam Matters Gis Resources
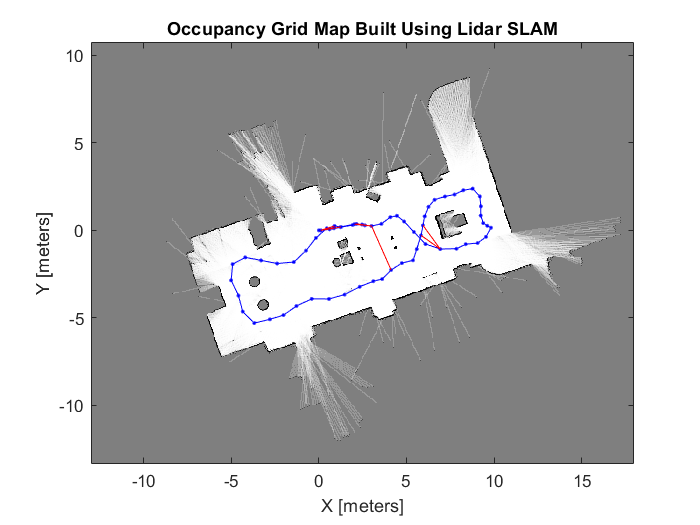
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Dibotics 3d Slam
Research Google Com Pubs Archive Pdf
Http Www Thinkmind Org Articles Vehicular 18 4 Pdf

What Is Simultaneous Localization And Mapping What Is Simultaneous Localization And Mapping Nvidia Blog

Efficient Continuous Time Slam For 3d Lidar Based Online Mapping Youtube
Www Ri Cmu Edu Wp Content Uploads 19 07 Ms Thesis Ws Pdf

Differences In Handheld Lidar Slam Algorithms Geo Matching Com
Lidar Mapping With Ouster 3d Sensors Ouster

An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai

Who Is Better Than Laser Slam And Visual Slam In Robot Positioning And Navigation Technology Develop Paper

Digitally Recreating Reality With Lidar Amp Slam

Navipack 300 Lidar For Plug And Play Slam Spar 3d

Elastic Lidar Fusion Dense Map Centric Continuous Time Slam Overview Programmer Sought
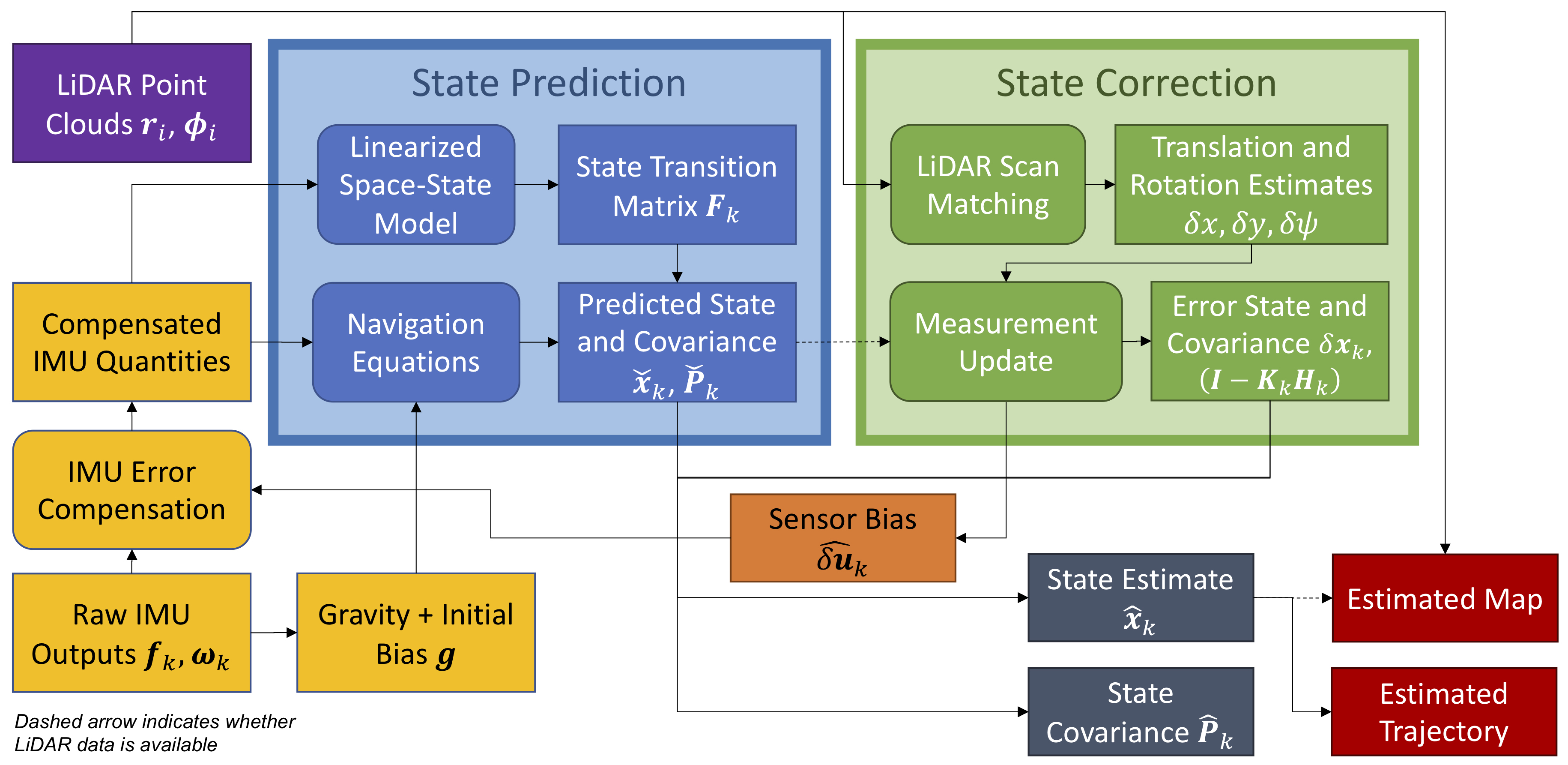
Lidar Based Slam Implementation Using Kalman Filter

Mapping Forests Using An Unmanned Ground Vehicle With 3d Lidar And Graph Slam Sciencedirect
Pdf An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Semantic Scholar
Http Www Thinkmind Org Articles Vehicular 18 4 Pdf
Lidar Based Slam Implementation Using Kalman Filter

Chinas5 Robot Vacuum Cleaner Lds Lidar Slam Algorithm Identifies Carpets And Increases Suction Power On Global Sources
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data

What S The Difference Between Slam Algorithms For Handheld Lidar Geo4construction
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

Lidar Integration With Ros Quickstart Guide And Projects Ideas
Google Releases Lidar Slam Algorithms Teases Innovative Mapping Solution Spar 3d
How Surveyors Should Use 3d Lidar Based Slam In 21

360 S6 Robotic Vacuum Cleaner Lds Lidar Scanning Slam Algorithm Automatic Remote Control Cleaning Robot 1800pa Suction Power 3000mah Battery Wish

Design Lidar Slam Algorithm Using Unreal Engine Simulation Environment Matlab Simulink Mathworks 中国

Lidar Based Multi Robot Slam Experiment During The Darpa Subterranean Download Scientific Diagram

The Overall Workflow Of Performing Simultaneous Localization And Download Scientific Diagram

360 S6 Robot Vacuum Cleaner 1800pa Suction Mopping Sweeping Mode App Remote Control Lds Lidar Slam Algorithm Sale Price Reviews Gearbest
Self Driving Robot Navigation Methodology Explained
Sensors Free Full Text Robust Gicp Based 3d Lidar Slam For Underground Mining Environment Html
Http Www Thinkmind Org Articles Vehicular 18 4 Pdf

Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

Veloview Lidar Slam Capabilities Kitware Blog

An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink Mathworks Italia
Www Mdpi Com 72 4292 11 11 1348 Pdf
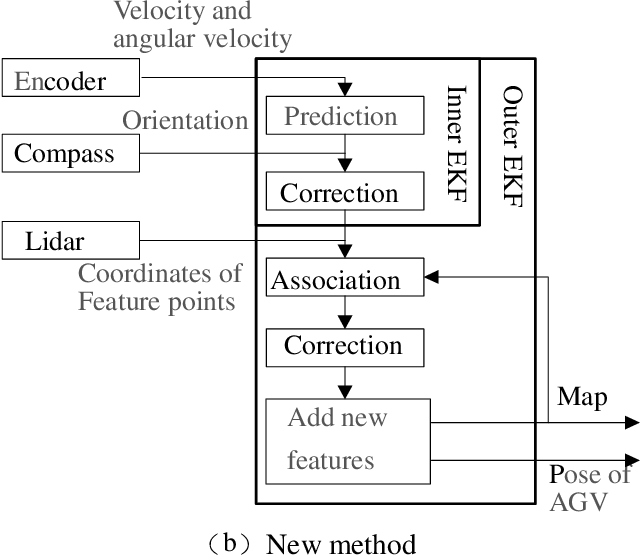
Pdf A New Ekf Slam Algorithm Of Lidar Based Agv Fused With Bearing Information Semantic Scholar
Lidar Slam Positioning Quality Evaluation In Urban Road Traffic Springerlink
Research Google Com Pubs Archive Pdf

What S The Difference Between Slam Algorithms For Handheld Lidar
Sensors Free Full Text A Review Of Visual Lidar Fusion Based Simultaneous Localization And Mapping Html
Building Maps Using Google Cartographer And The Os1 Lidar Sensor Ouster

Lidar Mapping With Ouster 3d Sensors By Daniel Lu Ouster Medium

An Easy Tutorial On Lidar Odometry Using Iterative Closest Pointbot Blog
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
Lidar Based Slam Implementation Using Kalman Filter
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data

Slam Your Robot Or Drone With Python And A 150 Lidar
Algorithm Walkthrough For Tuning Cartographer Ros Documentation
Iopscience Iop Org Article 10 10 1757 9x 1 1 0121 Pdf
Mapperbot Iscan Open Source Integrated Robotic Platform And Algorithm For 2d Mapping Springerlink

Veloview Lidar Slam Capabilities Kitware Blog

Fast Planar Surface 3d Slam Using Lidar Sciencedirect

The Overview Of The Proposed Slam System Based On Monocular Vision And Download Scientific Diagram
Http Www Remedypublications Com Open Access A Survey Of Slam Research Based On Lidar Sensors 4870 Pdf
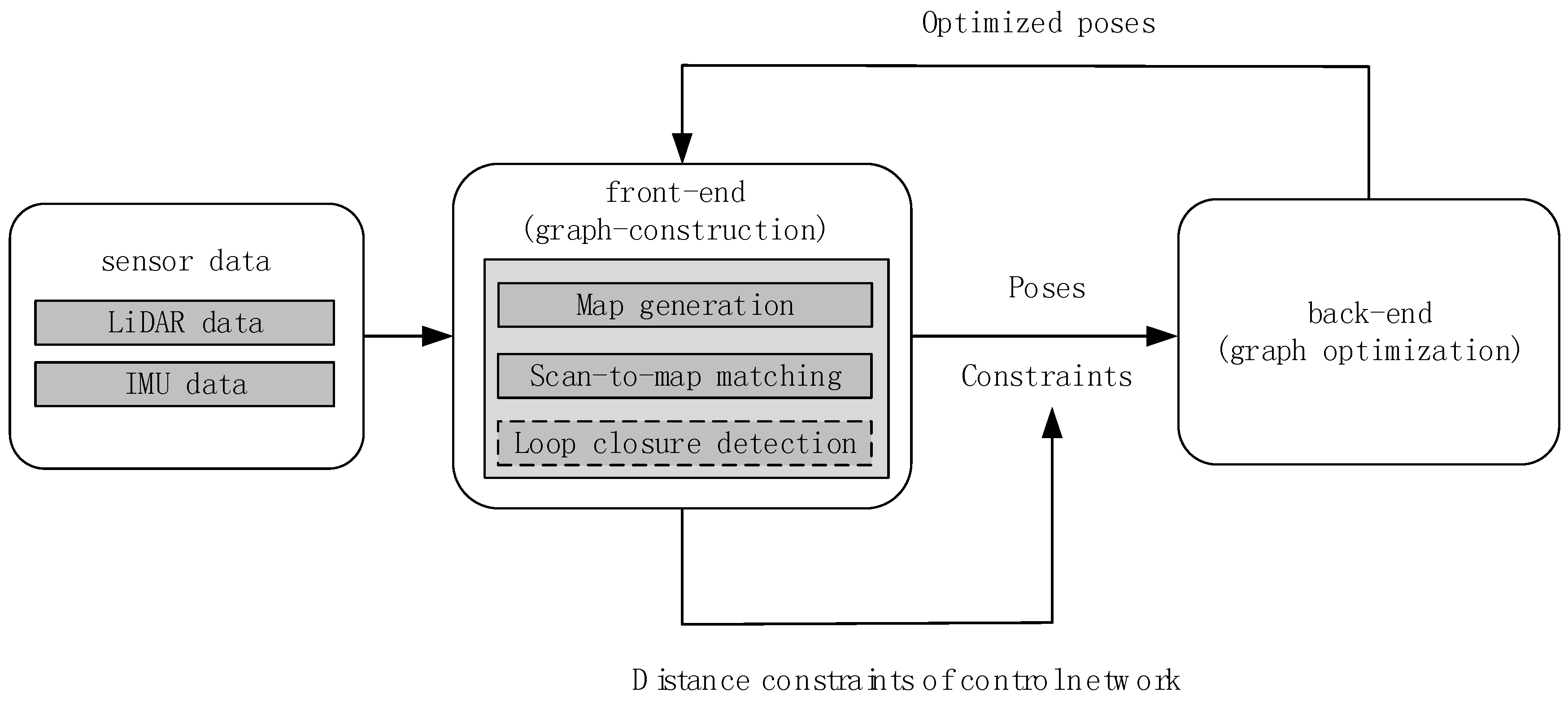
Sensors Free Full Text 2d Lidar Slam Back End Optimization With Control Network Constraint For Mobile Mapping Html

Slam Installation Of Google Lidar Slam Algorithm Cartographer And Demo Test Of Bag Programmer Sought
Forests Free Full Text Slam Aided Stem Mapping For Forest Inventory With Small Footprint Mobile Lidar Html
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

Lovoski Hotel Home Robot Cleaner Vacuum Ultrasonic Sensor Lds Lidar Ultrasonic Anti Collision Sensor Slam Algorithm Cleaner Vacuum Cleaners Aliexpress

Google Releases Lidar Slam Algorithms Teases Innovative Mapping Solution Spar 3d Algorithm Tease Solutions
Utm Arc Nasa Gov Docs 17 Hening Scitech 17 0448 Pdf

China S5 Robot Vacuum Cleaner Lds Lidar Slam Algorithm Identifies Carpets And Increases Suction Power On Global Sources
Kudan Has Started Offering A Development Partnership Program On Integration Of Visual Slam And Lidar For Visual Lidar Slam By Kudan Medium
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing



