Lidar Slam Ros
LIDAR visualization and SLAM (mapping & localization) executable for Windows;.

Lidar slam ros. Hdl_graph_slam is an open source ROS package for realtime 6DOF SLAM using a 3D LIDAR It is based on 3D Graph SLAM with NDT scan matchingbased odometry estimation and loop detection. Run roslaunch turtlebot2_lidar bringup_minimallaunch in panel 1) At this point you should see the lidar start to spin On panel 2) run roslaunch turtlbot2_lidar slam_toolbox_lidarlaunch I had to add a static_transform_publisher to the launch file publish a transform from the base_laser_link to laser. RPLIDAR is a low cost LIDAR sensor suitable for indoor robotic SLAM application It provides 360 degree scan field, 55hz/10hz rotating frequency with guaranteed 8 meter ranger distance, current more than 16m for and 25m for A3.
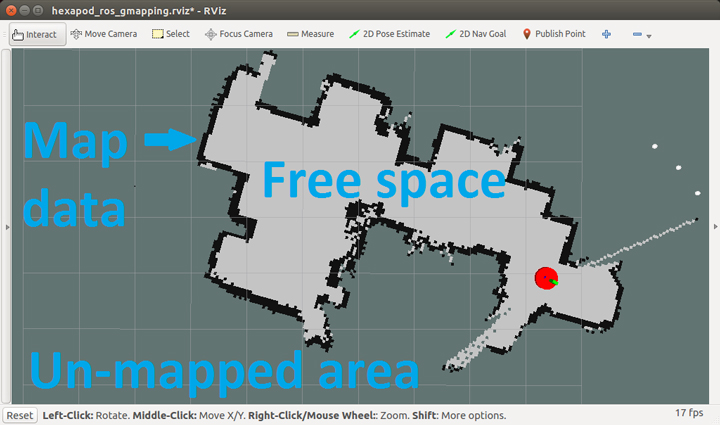
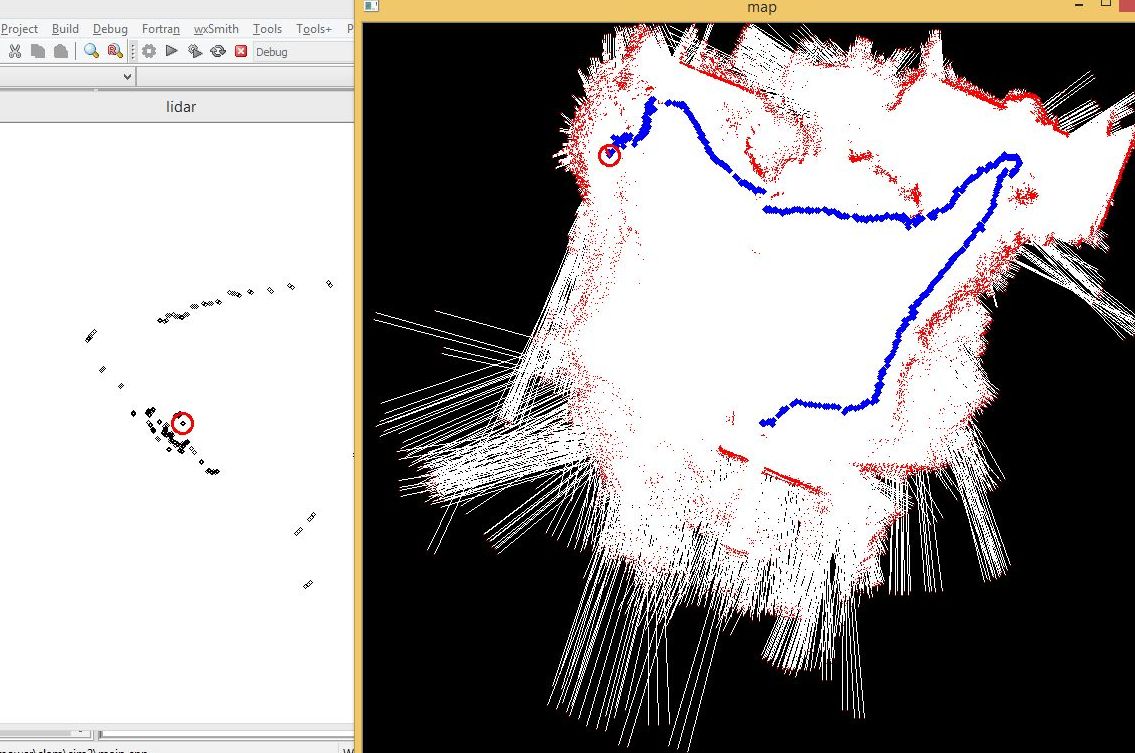
LiDAR is an optical device for detecting the presence of objects, specifying their position and gauging distance RPLIDAR is a lowcost LIDAR sensor suitable for indoor robotic SLAM (Simultaneous localization and mapping) application It can be used in the other applications such as General robot navigation and localization. The map is a 2D grid based SLAM map created by the hector_slam library for ROS It is based on the LiDAR sensor data and an approximative position of the robot It is based on the LiDAR sensor data and an approximative position of the robot. Roslaunch ydlidar_ros lidarlaunch roslaunch hector_slam_launch tutoriallaunch And open Rviz from another linux machine, if possible Now, as you’ll be driving around the space (slowly!.
SLAM Robotusing ros & lidar with raspberry pi, matlab Mapping robot using rosand matlab Introduction Turtle bot is a wellknown product, which uses the technology like SLAM and Navigation best suitable for home service robots It also contains multiple versions based on structure and features The bot, which is embedded with the gyro, Kinect. Laser and LiDAR sensors are more efficient and reliable in Navigation field rather than camera base sensor like Kinect I know these opensource packages that provide SLAM and Localization using LiDAR sensor which is compatible with ROS (if you are familiar to ROS) and there is rosbag file to test LiDAR base Localization;. ROS is a good framework in which we made the map around the RPLIDAR It is a great tool for build robot software systems which.
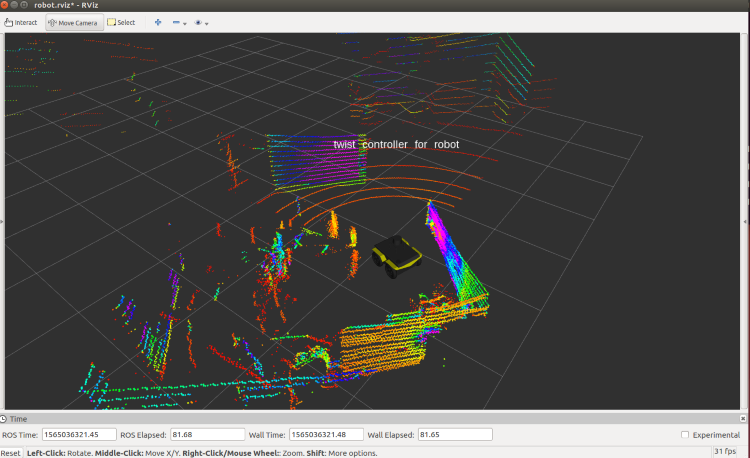
NlosExclusion GNSS NLOS exclusion package (under development) rtklibros rtklib in ros package rtklib;. SLAM (simultaneous localization and mapping) is a technique for creating a map of environment and determining robot position at the same time It is widely used in robotics While moving, current measurements and localization are changing, in order to create map it is necessary to merge measurements from previous positions. Fig 1 Basic scanning in ROS Internally, the LiDAR device is composed of a range measurement sensor that repeatedly transmits a pulse of light This pulse of light hits a target (wall, person, cardboard box, etc), then bounces off and returns to the range measurement sensor.
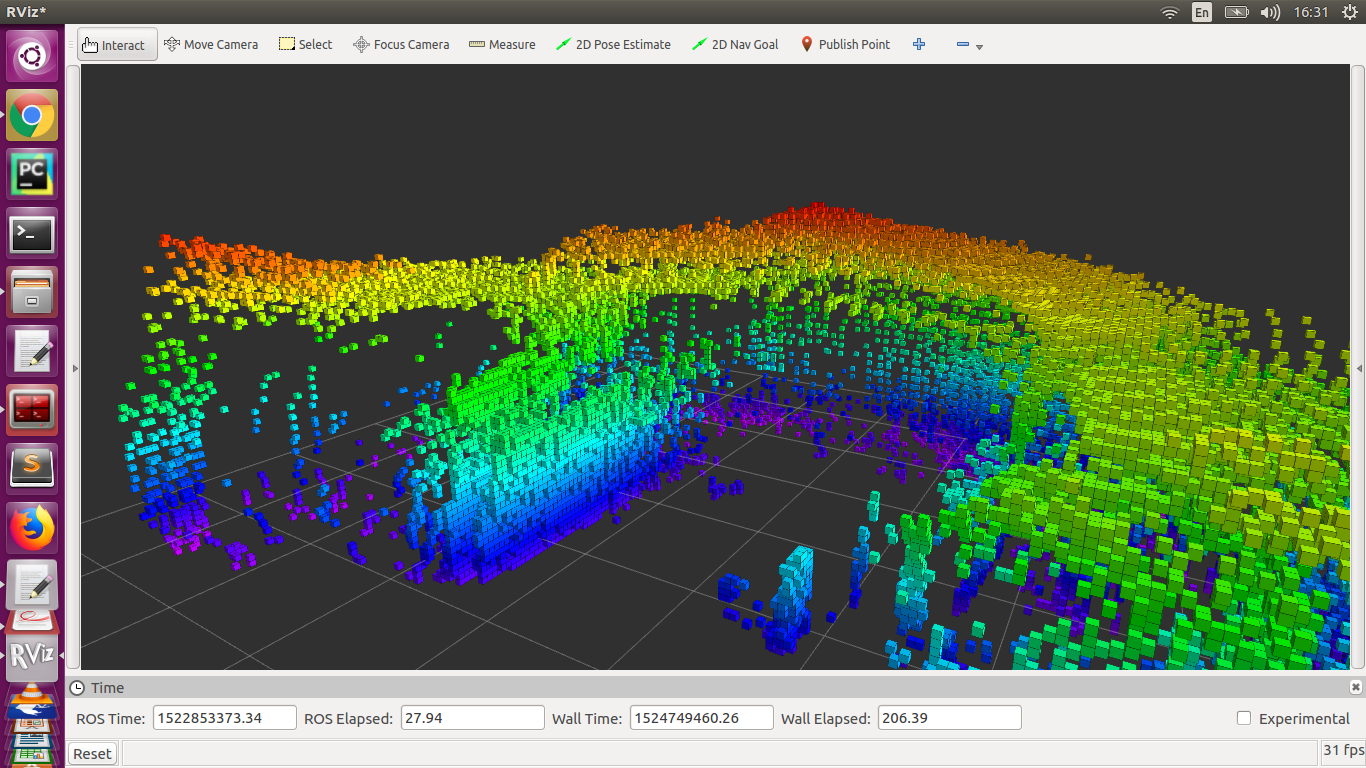
RPLIDAR is a low cost LIDAR sensor suitable for indoor robotic SLAM application It provides 360 degree scan field, 55hz/10hz rotating frequency with guaranteed 8 meter ranger distance By means of the high speed image processing engine designed by RoboPeak, the whole cost are reduced greatly, RPLIDAR is the ideal sensor in cost sensitive. The easiest way to do this, is to display the ROS topic containing the generated LiDAR data to the terminal With your package launched, open a new tabbed terminal (shiftctrlt) and run a rostopic list which will list the active topics The LiDAR data is being generated on the /velodyne_points topic. LiDAR matching using LiDAR matching between map and realtime point clouds Package description amsi adaptive multisensor integration package;.
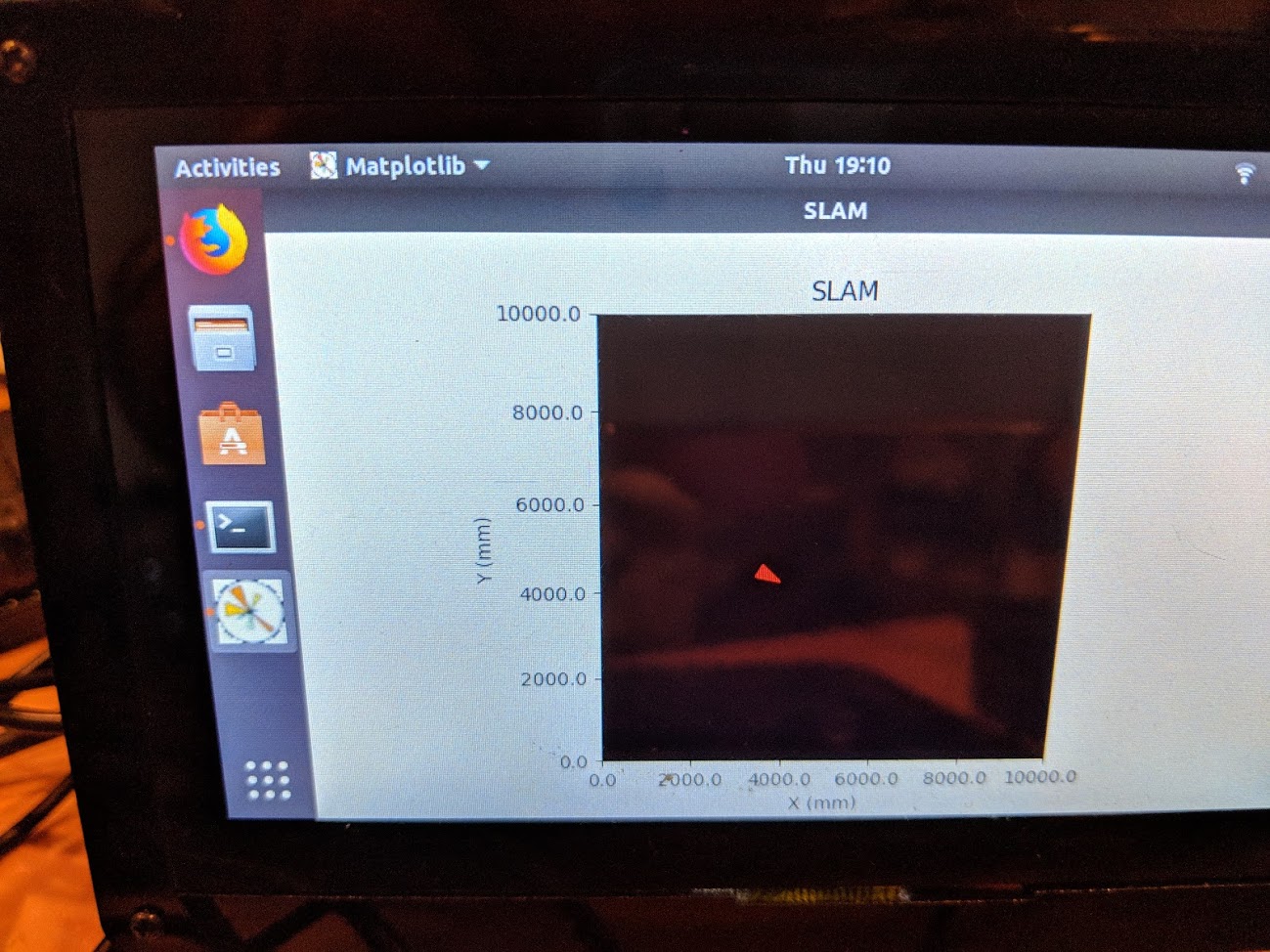
The frontend data collection of SLAM is of two types Visual SLAM and LiDAR SLAM Visual SLAM (vSLAM) uses camera to acquire or collect imagery of the surrounding Visual SLAM can use simple cameras (360 degree panoramic, wide angle and fisheye camera), compound eye cameras (stereo and multi cameras), and RGBD cameras (depth and ToF cameras). ROS Melodic on Raspberry Pi 4Debian Buster RPLIDAR A1M8 This article will cover the process of installing ROS Melodic Morenia on Raspberry Pi 4 running the latest Debian Buster and how to use RPLIDAR A1M8 with our installation Since Debian Buster was officially released just a few weeks ago(as of moment. SLAM Robot which uses the latest technology like ROS (Robotic Operating System) with Raspberry Pi and also interfaced with RPLidar a 360degree Lidar, which sends those Laser scan value to the Matlab to map the environment Features SLAM Simultaneous Localisation and Mapping Shipping 4 to 8 working days from the date of purchase Package Includes Complete Hardware Kit Demo VideoEmbedded.
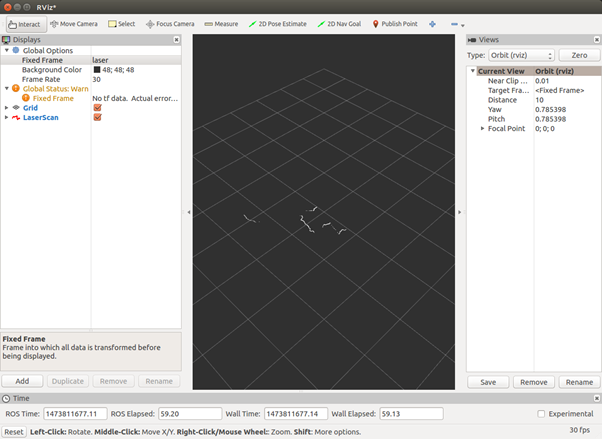
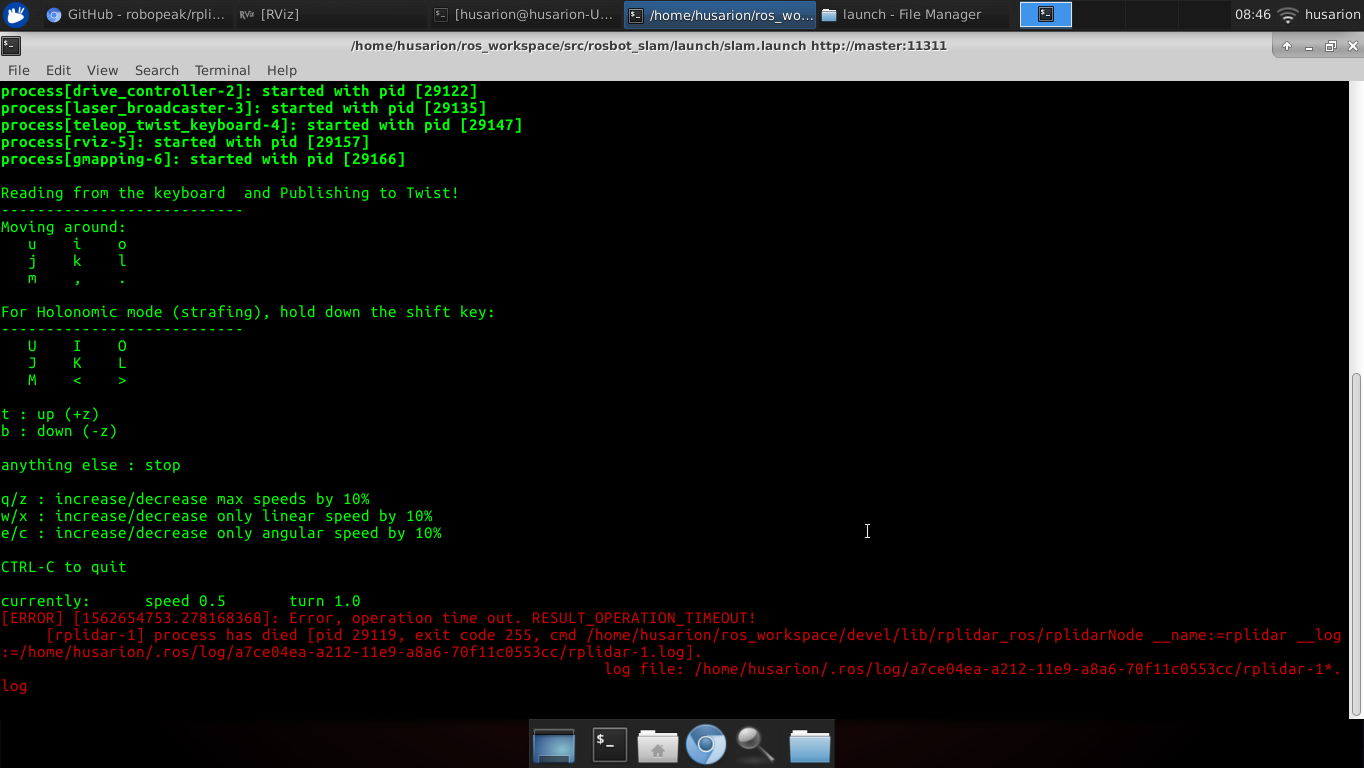
3D LIDARbased Graph SLAM hdl_graph_slam is an open source ROS package for realtime 6DOF SLAM using a 3D LIDAR It is based on 3D Graph SLAM with NDT scan matchingbased odometry estimation and loop detection. There're two ways to run rplidar ros package I Run rplidar node and view in the rviz roslaunch rplidar_ros view_rplidarlaunch (for RPLIDAR A1/) , roslaunch rplidar_ros view_rplidar_a3launch (for RPLIDAR A3) or roslaunch rplidar_ros view_rplidar_s1launch (for RPLIDAR S1). ROS and Hector SLAM for NonGPS Navigation This page shows how to setup ROS and Hector SLAM using an RPLidar lidar to provided a local position estimate for ArduPilot so that it can operate without a GPS These instructions were tested on an NVidia TX2 flashed with APSync and then ROS and MAVROS were installed as described here.
RPLIDAR is a lowcost LIDAR sensor suitable for indoor robotic SLAM application The produced 2D point cloud data can be used in mapping, localization and object/environment modeling RPLIDAR will be a great tool using in the research of SLAM (Simultaneous localization and mapping) Right now, there are three kinds of RPLIDAR for different features. The LiDAR Inertial SLAM I created in this article is a combination of ndt/gicp sequential SLAM and graphbased SLAM In creating the LiDAR Inertial SLAM, I modified the sequential SLAM part from. ROS SLAM ROS2 IMU Lidar はじめに 最近、LiDAR Inertial SLAMであるLIOSAMが発表されて、私の中でLiDAR Inertial SLAMが熱いです。.
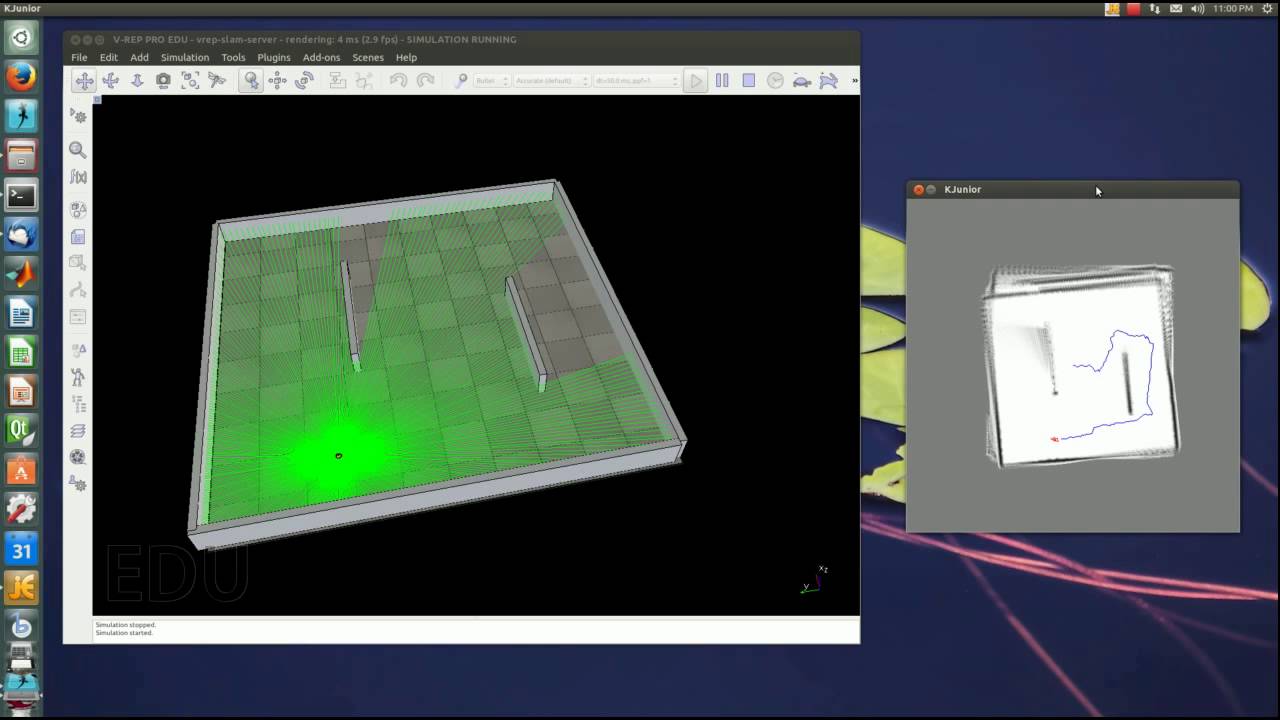
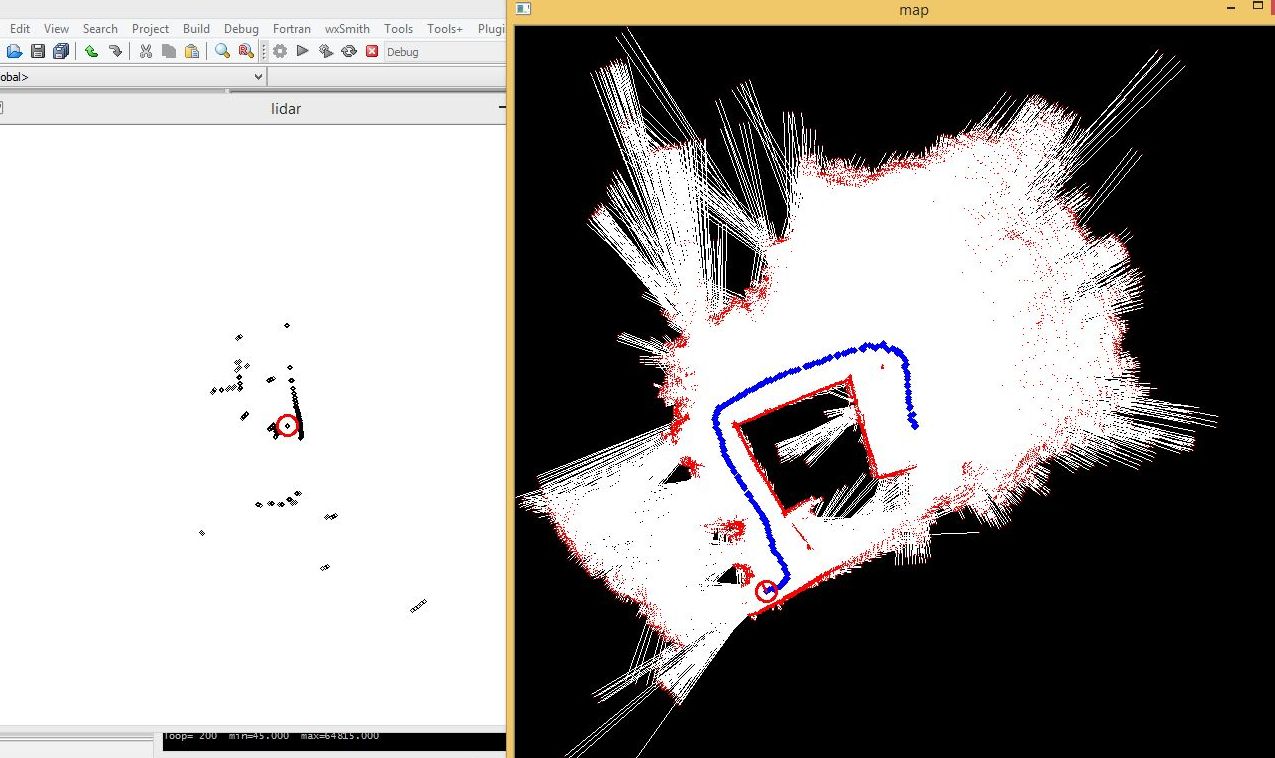
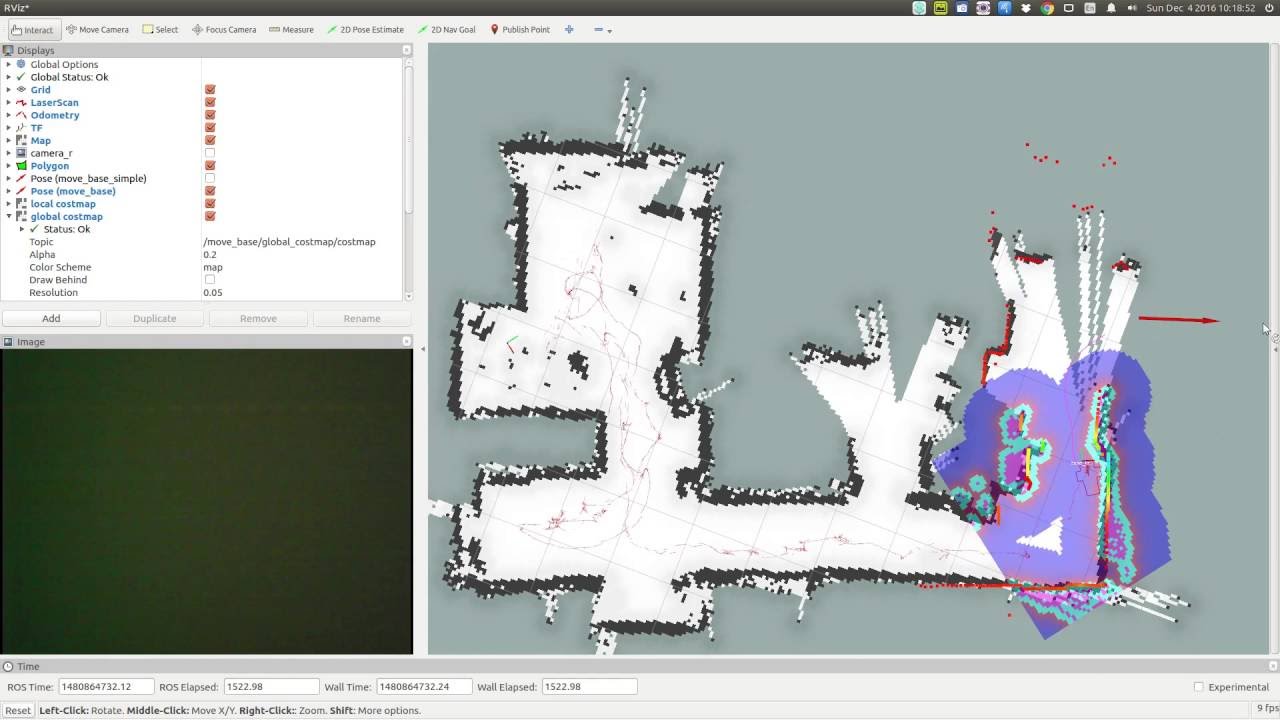
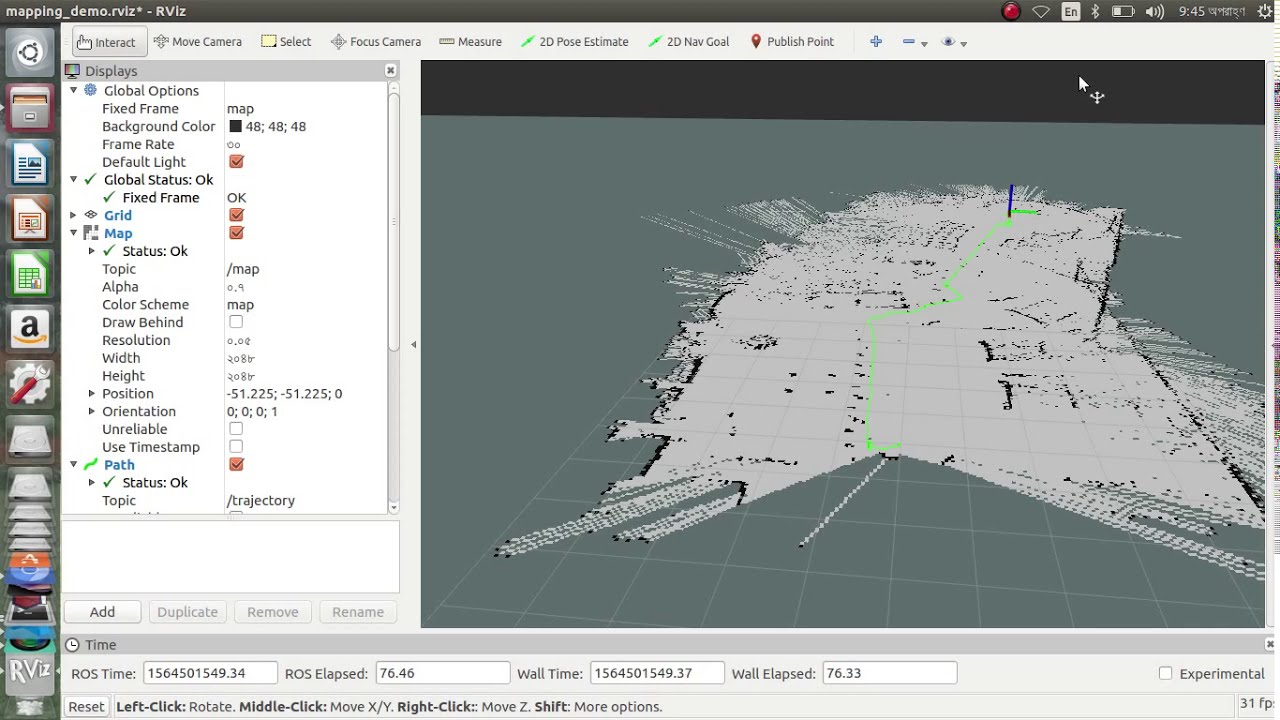
To bring up LIDAR, robot control and hector SLAM node Overall mapping results look much better than with ORBSLAM2, and Hector SLAM can even publish odometry and path messages, which open way for running autonomous navigation with ROS navigation stack The path looks much more precise and I can see the rough plan of the center of our office. SLAM Robot using ROS & LIDAR with Raspberry pi Click here for Video Demo This lowcost mapping bot emerges with features like SLAM (Simultaneous Localization and Mapping) which has the capability to form the Map of the environment using Lidar scans using Matlab’s Robotic Operating System Software package to communicate with ROS in the Raspberry Pi using ROS Network Configurations. Locate itself inside the map;.
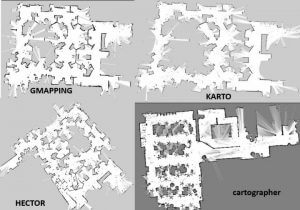
The rplidar A1 singleline lidar was used for 2D laser scan matching data acquisition in the practical experiments and the indoor map was built by using the open source algorithms gmapping, karto SLAM, hector SLAM software package for indoor SLAM, which can get the indoor grid maps in ROS graphical tool RVIZ. It is a good learning material for SLAM beginners Must be set up ROS (Kinetic or Melodic) Ceres Solver;. Run roslaunch turtlebot2_lidar bringup_minimallaunch in panel 1) At this point you should see the lidar start to spin On panel 2) run roslaunch turtlbot2_lidar slam_toolbox_lidarlaunch I had to add a static_transform_publisher to the launch file publish a transform from the base_laser_link to laser.
ROS and Hector SLAM for NonGPS Navigation¶ This page shows how to setup ROS and Hector SLAM using an RPLidar lidar to provided a local position estimate for ArduPilot so that it can operate without a GPS These instructions were tested on an NVidia TX2 flashed with APSync and then ROS and MAVROS were installed as described here They were also tested on an RaspberryPi 3 B with ROS and. RPLIDAR is a lowcost LIDAR sensor suitable for indoor robotic SLAM(Simultaneous localization and mapping) application It can be used in the other applications such as General robot navigation and localization;. Until recently, if you wanted to do SLAM (Simultaneous Location and Mapping) with LIDAR without a huge amount of coding work, you really only had one choice ROS on a beefy computer This had two problems 1) beefy computer (cost, size) 2) ROS (complexity, overhead, crazy difficult UI) Good news you don’t need either of them anymore.
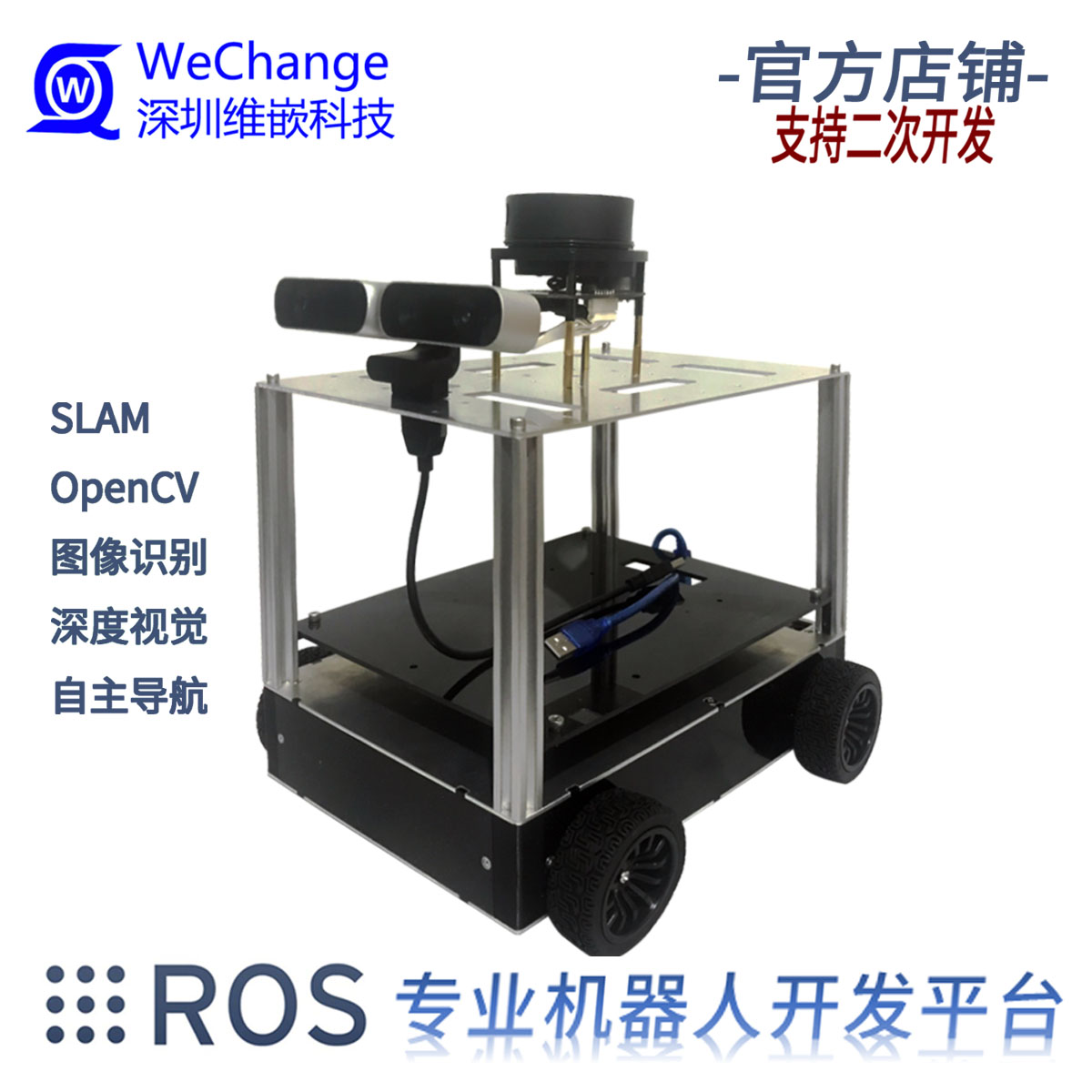
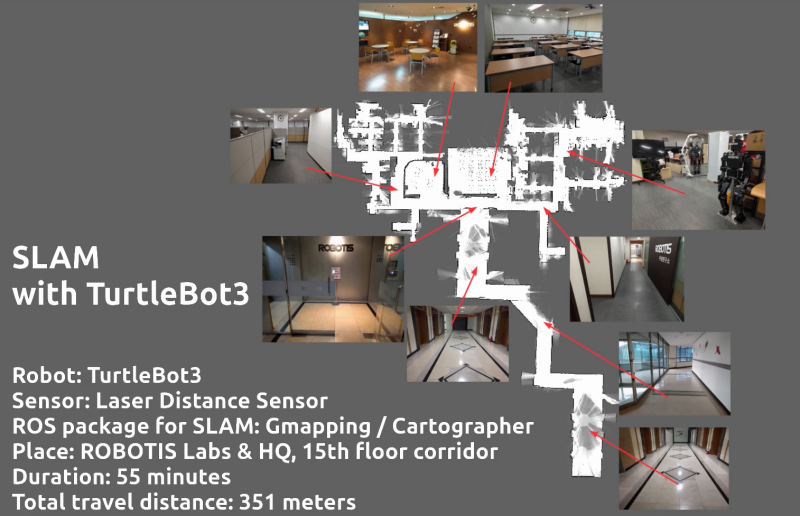
The LIDAR Robot Car ROS01 uses the LIDAR to detect the environment and build the map by SLAM technology It's a basic item for robot navigation and moving You can use IAdiy's LIDAR robot technology to create your own robot easily. RPLIDAR is a low cost LIDAR sensor suitable for indoor robotic SLAM application It provides 360 degree scan field, 55hz/10hz rotating frequency with guaranteed 8 meter ranger distance By means of the high speed image processing engine designed by RoboPeak, the whole cost are reduced greatly, RPLIDAR is the ideal sensor in cost sensitive. The SLAM (Simultaneous Localization and Mapping) is a technique to draw a map by estimating current location in an arbitrary space The SLAM is a wellknown feature of TurtleBot from its predecessors The video here shows you how accurately TurtleBot3 can draw a map with its compact and affordable platform.
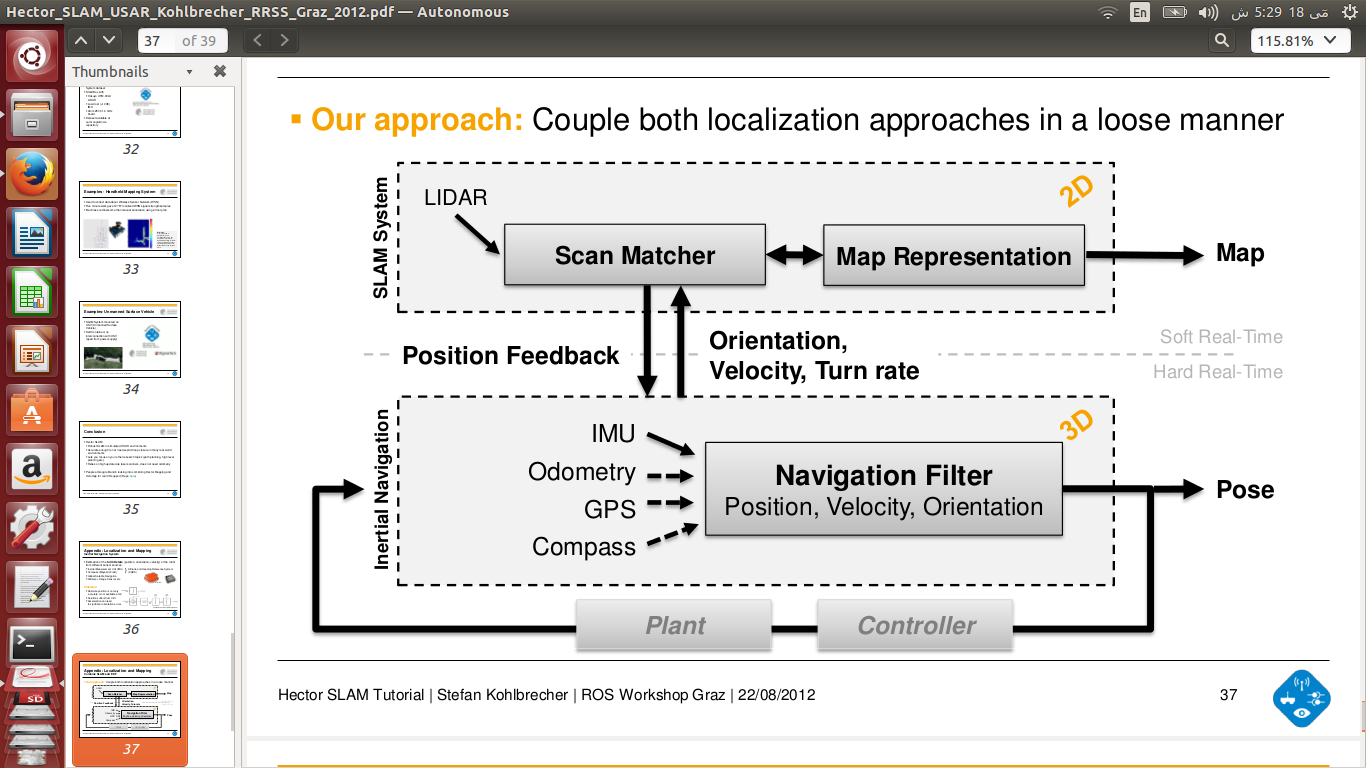
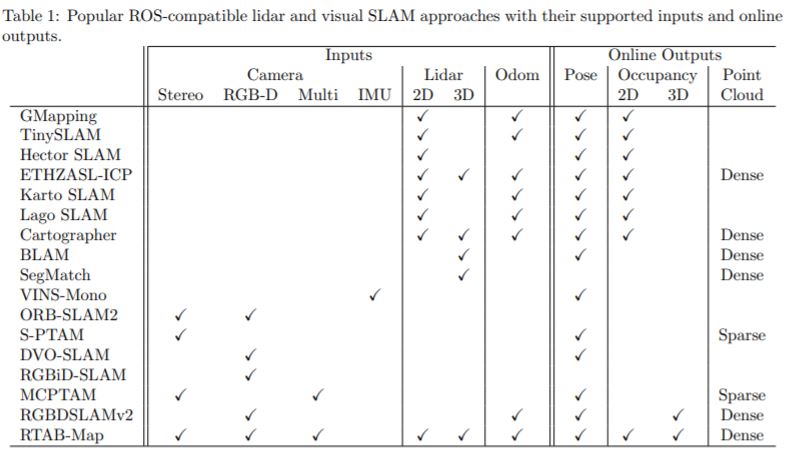
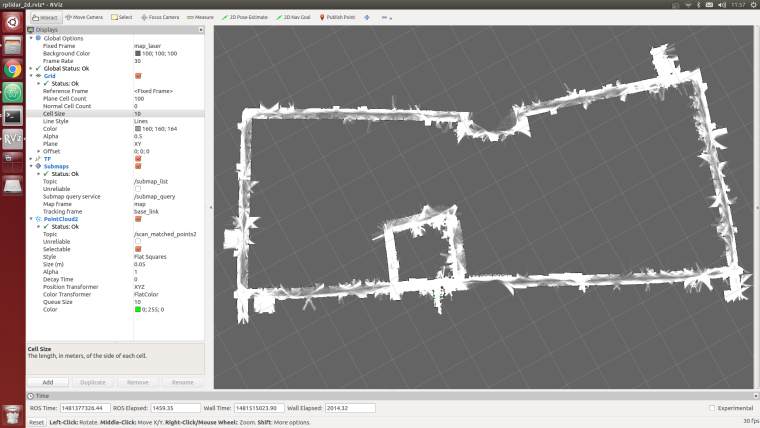
We want the map to be built accurately, so no need to give it a hard time doing so) you’ll see a map starting to. Adaptations of SLAM systems to LIDAR data Sections 4 and 5 provide evaluation results and conclusions 2 STATE OF THE ART RTABMap is another realtime system with ROS support that can work with 2D LIDARs and stereo setups (apart from RGBD cameras) It is based on a graph of links and nodes. Time, ROSbased LIDAR package hector_slam 2 is running After a successful checkin, the v ideo stream wa s processed by monocular SLAM algorithms We made verification.
The rplidar A1 singleline lidar was used for 2D laser scan matching data acquisition in the practical experiments and the indoor map was built by using the open source algorithms gmapping, karto SLAM, hector SLAM software package for indoor SLAM, which can get the indoor grid maps in ROS graphical tool RVIZ. SLAM stands for “Simultaneous Localization and Mapping” This means that the device performing SLAM is able to Map the location, creating a 3D virtual map;. Create Lidar Slam Object Create a lidarSLAM object and set the map resolution and the max lidar range This example uses a simulated virtual environment The robot in this vrworld has a lidar sensor with range of 0 to 10 meters Set the max lidar range (8m) smaller than the max scan range, as the laser readings are less accurate near max range.
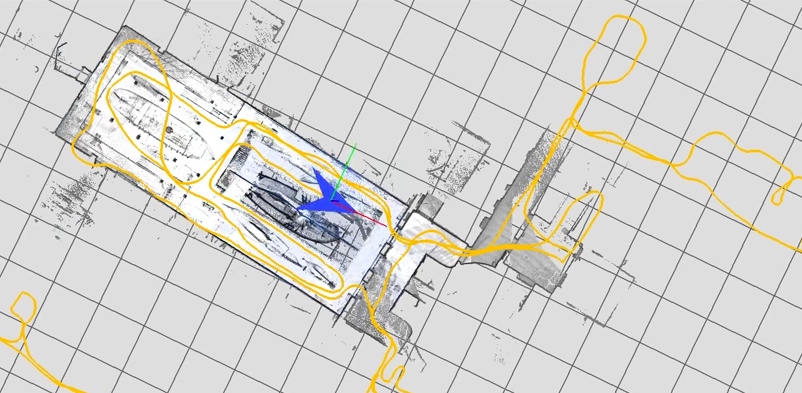
Pcl_localization_ros2 — ROS2 package of 3D LIDARbased Localization using the static map li_slam_ros2 — A lidar inertial slam version of lidarslam_ros2 Written by Ryohei Sasaki. Time, ROSbased LIDAR package hector_slam 2 is running After a successful checkin, the v ideo stream wa s processed by monocular SLAM algorithms We made verification. We took a Turtlebot running ROS with 2D LiDAR, and added Kudan SLAM as a ROS navigation module Let’s look at a case without Kudan SLAM enabled We set up the robot, and manually provide it the initial pose, as required by the ACML module The robot works well, but we’ll force it to lose tracking.
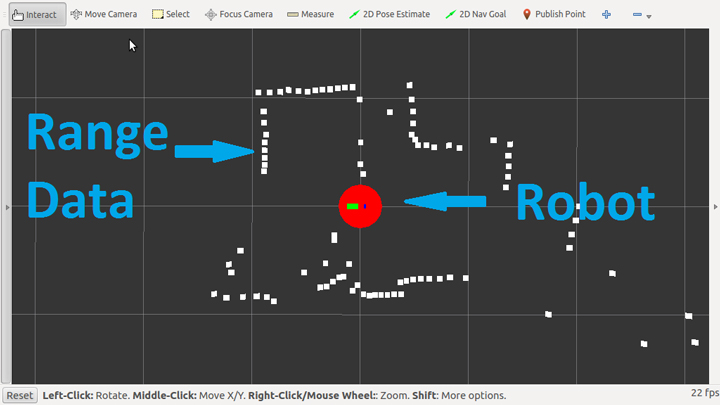
Sample SLAM navigation using a 2D Laser scanner and ROS. Visual SLAM, also known as vSLAM, is a technology able to build a map of an unknown environment and perform location at the same time It simultaneously leverage the partially built map, using just. ROS package to find a rigidbody transformation between a LiDAR and a camera for "LiDARCamera Calibration using 3D3D Point correspondences" Complex Yolov4 Pytorch Fullpython LiDAR SLAM using ICP and Scan Context.
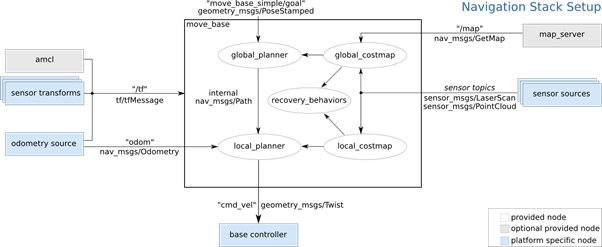
A ROS node to perform a probabilistic 3D/6DOF localization system for mobile robots with 3D LIDAR(s) It implements pointcloud based Monte Carlo localization that uses a reference pointcloud as a map. Cartographer SLAM for NonGPS Navigation¶ This page shows how to setup ROS and Google Cartographer SLAM using an RPLidar lidar to provided a local position estimate for ArduPilot so that it can operate without a GPS These instructions were tested on an NVidia TX2 flashed with APSync and then ROS and MAVROS were installed as described here. ROSbot ROSbot is an autonomous, open source robot platform based on ROS Reinforced with a development platform and free online tools such as Web UI, set of tutorials, manuals, simulation model and more, it is a great choice for learning how to program autonomous vehicles.
Pcl_localization_ros2 — ROS2 package of 3D LIDARbased Localization using the static map li_slam_ros2 — A lidar inertial slam version of lidarslam_ros2 Written by Ryohei Sasaki. LiDAR SLAM Light detection and ranging (lidar) is a method that primarily uses a laser sensor (or distance sensor) Compared to cameras, ToF, and other sensors, lasers are significantly more precise, and are used for applications with highspeed moving vehicles such as selfdriving cars and drones. The LiDAR Inertial SLAM I created in this article is a combination of ndt/gicp sequential SLAM and graphbased SLAM In creating the LiDAR Inertial SLAM, I modified the sequential SLAM part from.
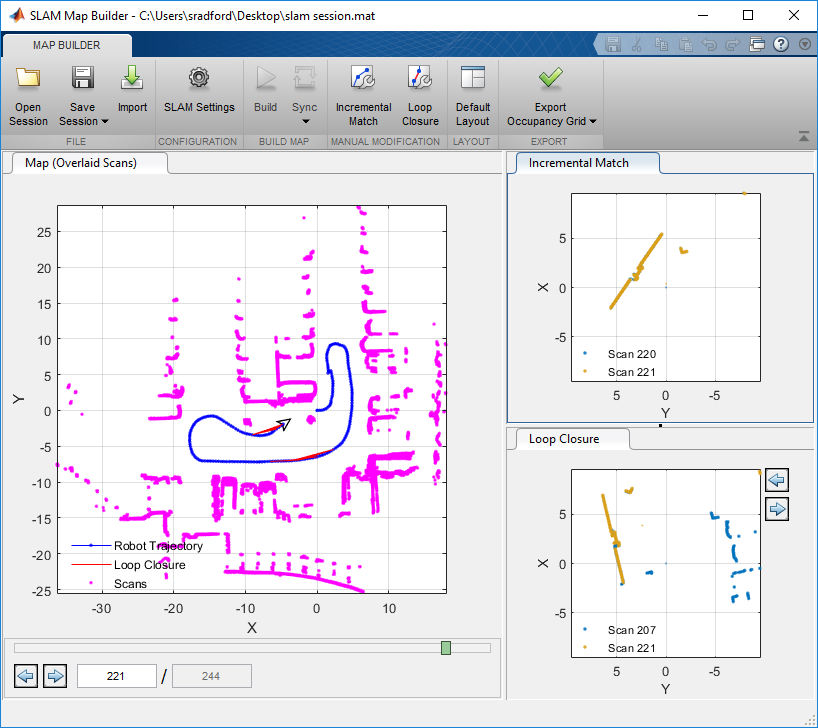
Time, ROSbased LIDAR package hector_slam 2 is running After a successful checkin, the v ideo stream wa s processed by monocular SLAM algorithms We made verification. Use of a Lidar is a popular method of implementing robot navigation We are going to supply here some basic starter launch files and some directions for how to get started in robot navigation using a Lidar The Lidar will allow the robot to see walls all around and both map and then later navigate within a known mapped area. The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map.
Mapping LiDAR mapping and its integration with GNSS (in local frame) (SLAM) Currently support. Open box and setup of the RPLidar A1M8, 360 degrees Laser Range Finder*** Thanks to Robotshop https//rb1shop/2Yevghk ***After a brief introduction and run. The LIDAR Robot Car ROS01 uses the LIDAR to detect the environment and build the map by SLAM technology It's a basic item for robot navigation and moving You can use IAdiy's LIDAR robot technology to create your own robot easily.
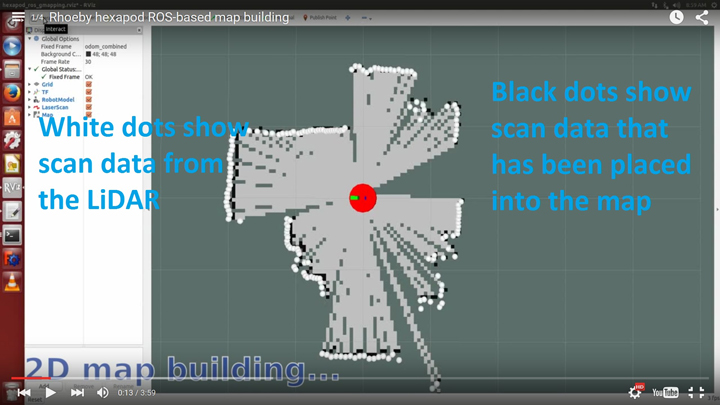
Roslaunch ydlidar_ros lidarlaunch roslaunch hector_slam_launch tutoriallaunch And open Rviz from another Linux machine, if possible or in the rapsberry pi monitor to see it Now, as you’ll be driving around the space (slowly!. The easiest way to do this, is to display the ROS topic containing the generated LiDAR data to the terminal With your package launched, open a new tabbed terminal (shiftctrlt) and run a rostopic list which will list the active topics The LiDAR data is being generated on the /velodyne_points topic. ROS node (graulidarpy) 10 Example usages SLAM (Simultaneous Localization and Mapping) Using a SLAM algorithm (eg Hector SLAM), you can create maps (mapping) and estimate your position in those maps (localization).
Photo of the lidar installed at the Roomba The left board is Orange Pi PC running ROS nodes (Lidar node, Roomba node, Hector SLAM) All robot controlling was manual (using keyboard) The resulting map of the rooms This map was created with lidar working at 2 deg angular resolution mode Also I have published Firmware code and lidar ROS node. RPLIDAR is a low cost LIDAR sensor suitable for indoor robotic SLAM application It provides 360 degree scan field, 55hz/10hz rotating frequency with guaranteed 8 meter ranger distance, current more than 16m for and 25m for A3. We want the map to be built accurately, so no need to give it a hard time doing so) you’ll see a map starting to be build in real time, in Rviz.
Build 2 D Grid Maps Using Lidar Based Slam Matlab
Ai Robot Ros Robot With Jetson Nano Xiaor Geek Official Store
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow
Lidar Slam Ros のギャラリー
Iopscience Iop Org Article 10 10 1742 6596 1529 4 0432 Pdf
Supercharge Your 2d Lidar Ros Robot With Kudan Visual Slam Kudan Global

Advice For Slam With 3d Lidar Ros Answers Open Source Q A Forum

Steering Smart Car Lidar Steering Smart Car

Slam Navigation Ros Lidar Youtube

Lidar Slam Robot Car Ros 01
Google Releases Lidar Slam Algorithms Teases Innovative Mapping Solution Spar 3d

Lidar Integration With Ros Quickstart Guide And Projects Ideas

Slam 1 Testing Ros With The Gmapping Package Youtube
Lidar Integration With Ros Quickstart Guide And Projects Ideas

Prevent Broken Overlapping Maps W Hector Slam Hokuyo Utm 30lx Ros Answers Open Source Q A Forum
Http Www Diva Portal Org Smash Get Diva2 Fulltext01 Pdf
Octomap Pointcloud Accumulation Problem Ros Answers Open Source Q A Forum
Rplidar And Ros Programming The Best Way To Build Robot Latest Open Tech From Seeed Studio

Ydlidar G4 Lidar Laser Rangefinder 2d Laser Scanner For Ros Slam Robot Free Shipping Demo Board Aliexpress

Ydlidar X4 Lidar For Roomba Ros Slam Robots Agv Detection 10m Sample Rate 5khz For Sale Online Ebay
Lidar Slam Without Ros For Less Than 0
Lidar Slam Without Ros For Less Than 0

Lidar Slam Robot Car Ros 01

Lidar Slam Robot Car Ros 01

Neato Xv 11 To Ros Slam Tutorial Janez Cimerman

Ros Neato Driver Hecor Slam On Raspberry Pi 2b Tutorial Janez Cimerman
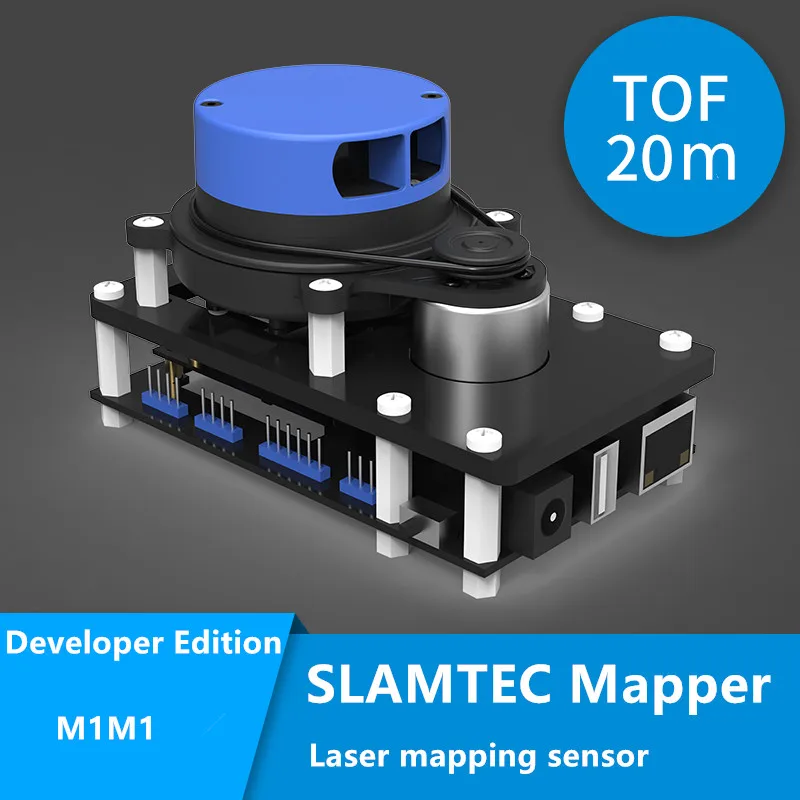
Rplidar Outdoor Slamtec Mapper M1m1 Map Construction And Slam Positioning Tof Meters Lidar Sensor Compatible With Ros Home Automation Kits Aliexpress

3d Slam In Dynamic Indoor Outdoor Environment Using A Tilted 2d Lidar Youtube
Hi Everyone I Am New To Ros And I Want To Make A 3d Map Using A Lidar And A Kinect Is It Possible Ros Answers Open Source Q A Forum

Github Koide3 Hdl Graph Slam 3d Lidar Based Graph Slam

Slam Navigation Husarion Docs

Slam Navigation Husarion Docs

Lidar Slam With Ros Youtube
Flow Chart Of Position Control Program This Design Uses Slam Algorithm Download Scientific Diagram

Cartographer Odometry Imu Lidar With Ros Youtube
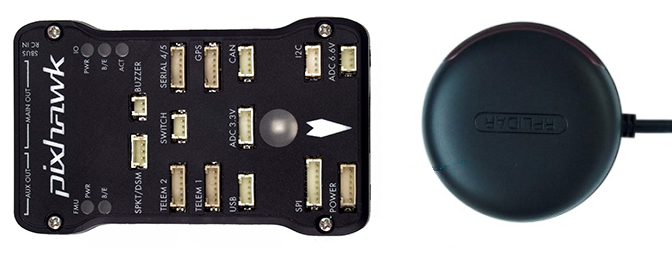
Ros And Hector Slam For Non Gps Navigation Dev Documentation

Lidar Slam Robot Car Ros 01

Elecrow Ydlidar X4 360 Degree 2d Lidar Ranging Sensor For Ros Robot Slam 3d Reconstruction Module Ranging Range 0 12 10m 74

Hands On With Slam Toolbox

Slamtec Mapper Lidar Sensor Tof m For Map Construction Slam Position For Ros Ebay

Nvidia Jetson Nano Lidar Car Ros Robot Platform Slam Mapping Navigation Obstacle Avoidance
Ros Slam Robot Mecanum Wheel Car Chassis With Lidar Raspberry Pi Navigation With Dc 12v Motor Diy Arduino Stem Program Toy Parts Programmable Toys Aliexpress
What Is Different Rgbd Slam Vs Rtab Map Slam Ros Answers Open Source Q A Forum
Zdefuxz6iqus M
Q Tbn And9gctyjkrug4klqtpfghdqje0dimhhhruqkpsxvsnofgleowh9km 7 Usqp Cau
Xiaoqiang Tutorial 16 Large Scale Lidar Slam And Real Time Loop Closure Test 蓝鲸ros机器人论坛

Lidar Map For Different Robot Trajectories Green Color With Ros Download Scientific Diagram
Www Ri Cmu Edu Wp Content Uploads 19 07 Ms Thesis Ws Pdf

3d Slam With Lidar

Nvidia Jetson Nano Lidar Moveit Robotic Arm Ros Cart Robot Slam Autonomous Navigation Xiaor Geek Official Store

Mapping Forests Using An Unmanned Ground Vehicle With 3d Lidar And Graph Slam Sciencedirect

Teraranger Tower Laser Ranging Lidar Module Matrix Slam Ros Pixhawk 8 Sensor Leather Bag
Ouster Os 1 Lidar And Google Cartographer Integration

Amazon In Buy Lidar 053 Eai Ydlidar 360 Lidar G4 Lidar Laser Rangefinder 2d Laser Scanner For Ros Slam Robot Sweeping And Positioning Online At Low Prices In India Youyeetoo Reviews Ratings

04 Creating Map Using Laser Scanner And Gmapping Kiranpalla Com

Slam Based On Rplidar And Ros Hector Mapping Youtube

Ros Robot Ai Artificial Intelligence Car Slam Lidar Navigation Path Planning Raspberry Pi Opencv Rc Cars Aliexpress

Ros Integration Quadrotor 2d Mapping Navigation

Smartfly Ydlidar X2l Low Cost 2d Laser Radar Scanner Ranging Sensor Module For Ros Slam Robot Indoors Smart Remote Control Aliexpress
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing
Hector Slam Sick Use Tf Scan Transformation True Or False Ros Answers Open Source Q A Forum

Pin Em Lidar Slam

Hector Slam Test Ros Ydlidar X4 Raspberry Pi 3 B Youtube
Rplidar And Ros Programming The Best Way To Build Robot Latest Open Tech From Seeed Studio

Visual And Lidar Based Slam With Ros Using Bittle And Raspberry Pi Youtube
Ros Robot Operating System Drivers Microstrain
410 59 Autonomous Navigation Of Ros Robot Ros Car Slam Lidar Kinect Vision Agv Remote Control From Best Taobao Agent Taobao International International Ecommerce Newbecca Com
Turtlebot3

Minibalance Ros Robot Car With Lidar Slam Robotic Gizmos

3d Slam With Lidar

Ros For Simple Self Driving Mobile Robot Qualityminds

Ros 2 Maps Maps Maps Rover Robotics Blog
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow

A Full Autonomous Stack A Tutorial Ros Raspberry Pi Arduino Slam Yorai

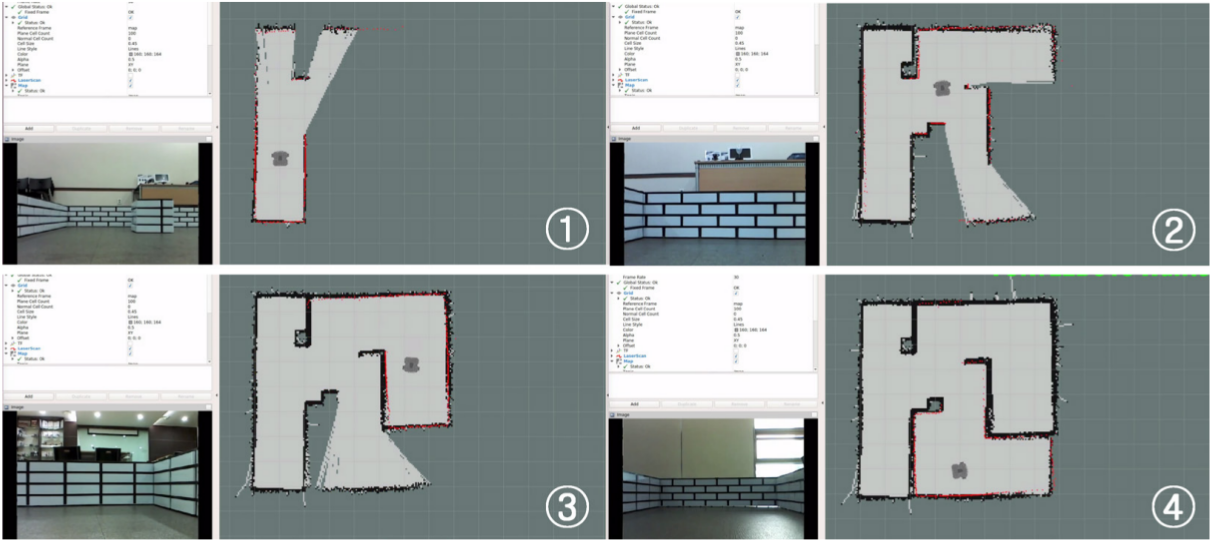
Pdf Comparison Of Ros Based Visual Slam Methods In Homogeneous Indoor Environment
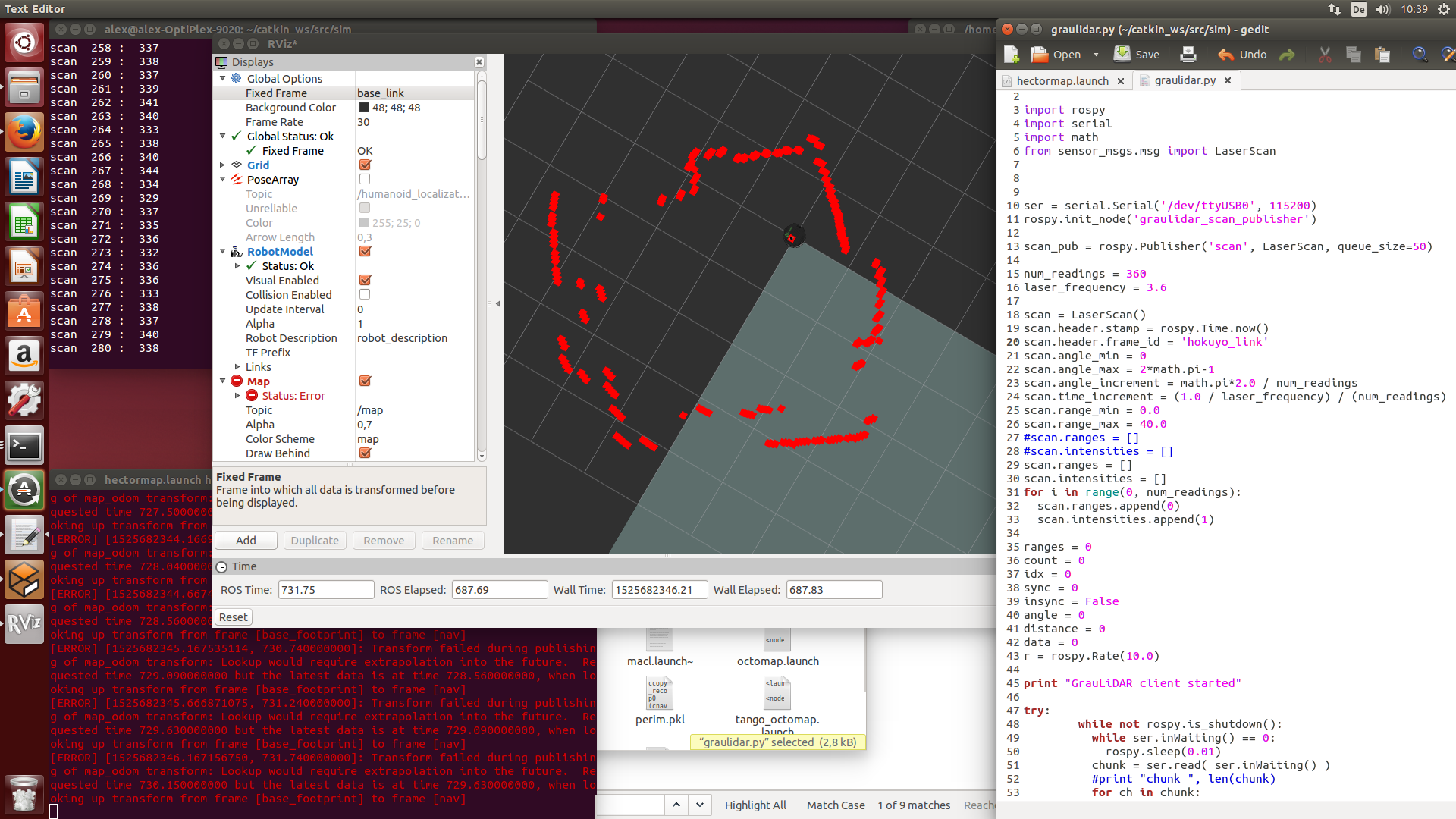
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing

Neato Xv 11 To Ros Slam Tutorial Janez Cimerman
Hovermap Powerful Slam For Drone Autonomy And Lidar Mapping Spar 3d
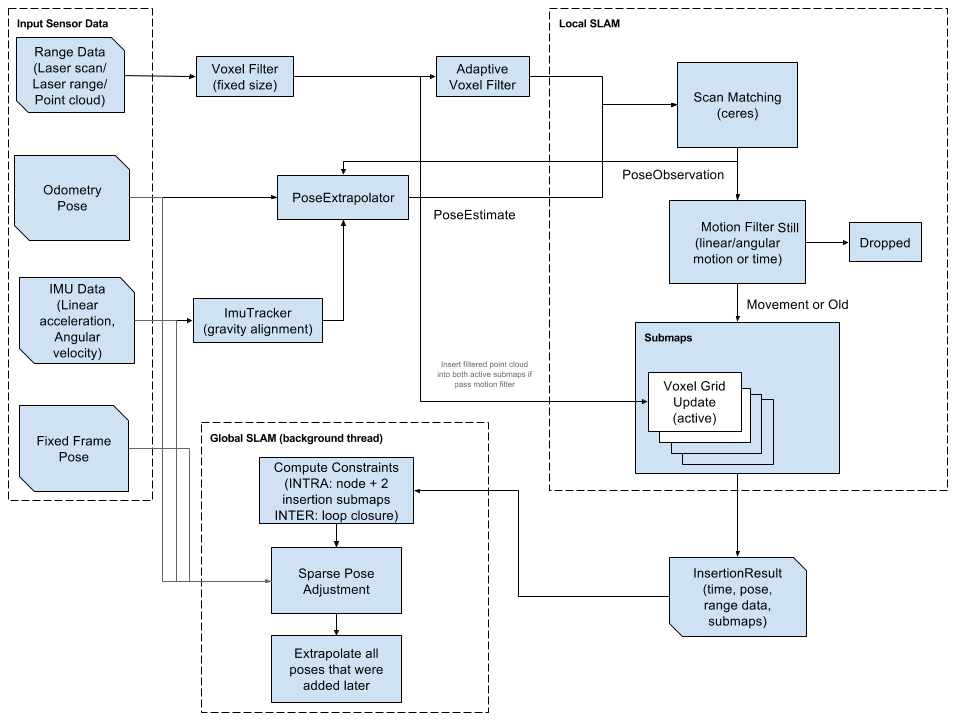
Cartographer Cartographer Documentation

Blog Rhoeby Dynamics
Http Www Diva Portal Org Smash Get Diva2 Fulltext01 Pdf

Ros 2 Maps Maps Maps Rover Robotics Blog

Amazon Com Ydlidar G4 Lidar Laser Rangefinder 2d Laser Scanner For Ros Slam Robot Indoors Electronics

Scanse Lidar Hector Slam Demo Ros Lunar Youtube
Slam With Lidar And Wheel Encoders In Ros Youtube
Slam Robot Using Ros Lidar With Raspberry Pi Youtube
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing
Solved Gmapping Slam Failure Due To Lidar Issue Software Husarion Community

Google Cartographer 2d Slam With Sick Tim Lidar And Xsens Imu Youtube

Installing The Rplidar Lidar Sensor On The Raspberry Pi By Dexter Industries Robotics With Ros Medium
Lidar Integration With Ros Quickstart Guide And Projects Ideas

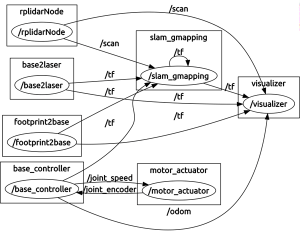
The Software Architecture Based On Ros Ros Nodes Are Represented By Download Scientific Diagram

Slamtec Rplidar Indoor Outdoor Mapper For Map Construction And Slam Po Racergadgets Co Za
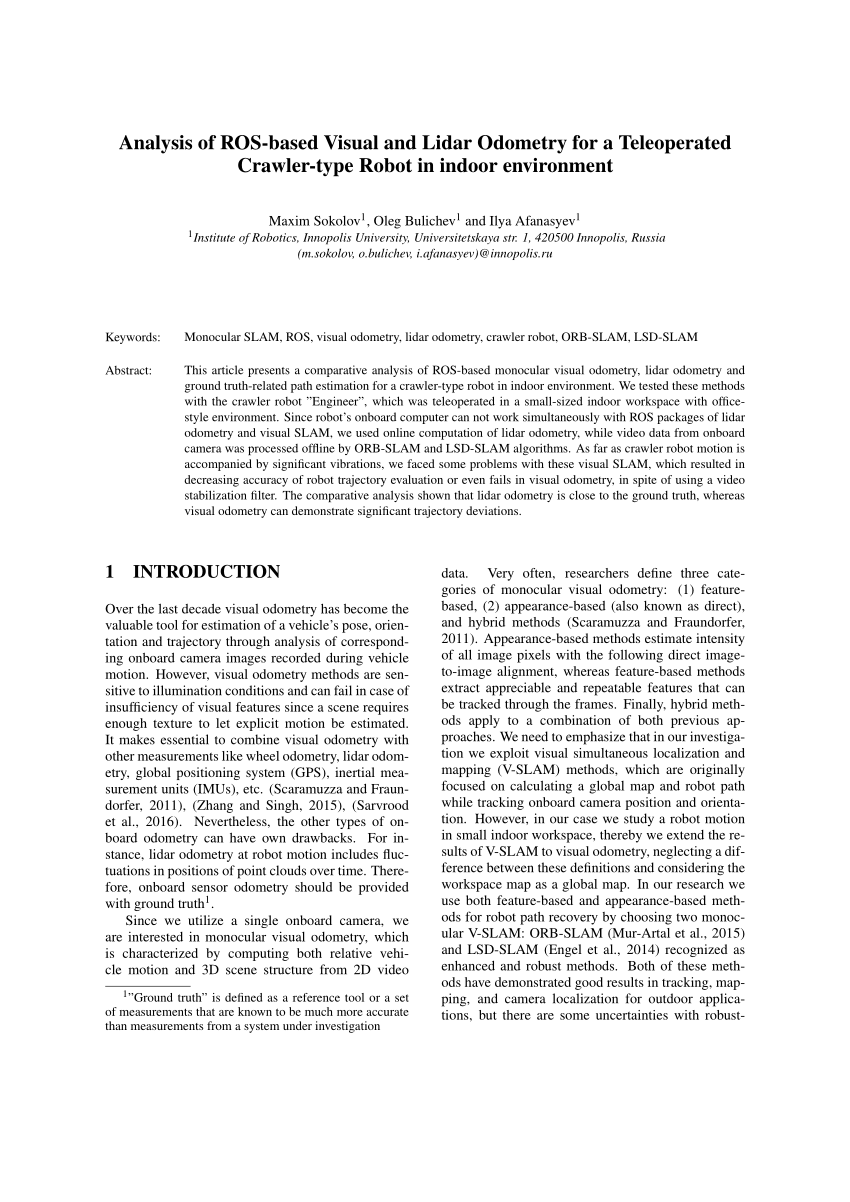
Pdf Analysis Of Ros Based Visual And Lidar Odometry For A Teleoperated Crawler Type Robot In Indoor Environment
Turtlebot3
Localization Issue Using Gmapping And Odom Data Ros Answers Open Source Q A Forum

Tof Faselase 100 Meters Economical Laser Distance Lidar Sensor Ros For Agv Robot Slam Laser Scanning Leather Bag
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow
Turtlebot3

Rplidar Lidar Slamtec Slam Positioning Navigation Car Sdpmini Robot Development Platform Ros Smart Remote Control Aliexpress
Lidar Based Slam Path Tracking In Ros With Rplidar A1 Youtube

Ros 2d Slam With Lidar Cartographer Hector Gmapping Karto Youtube



