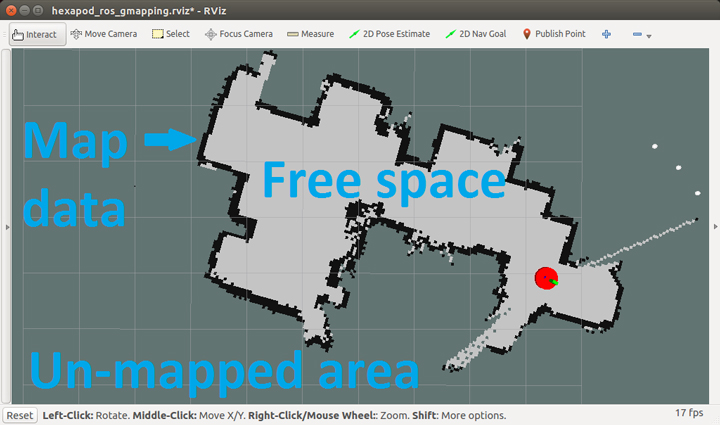
2d Lidar Slam
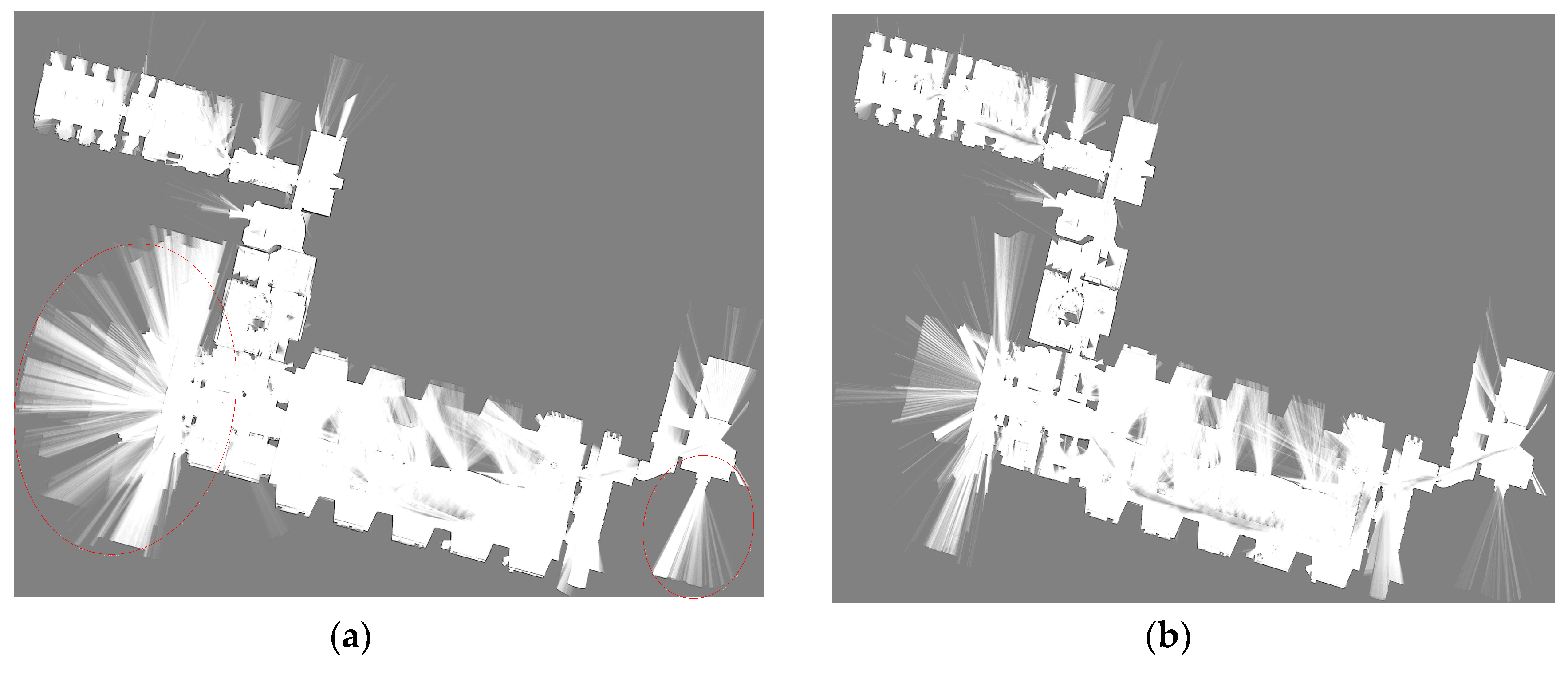
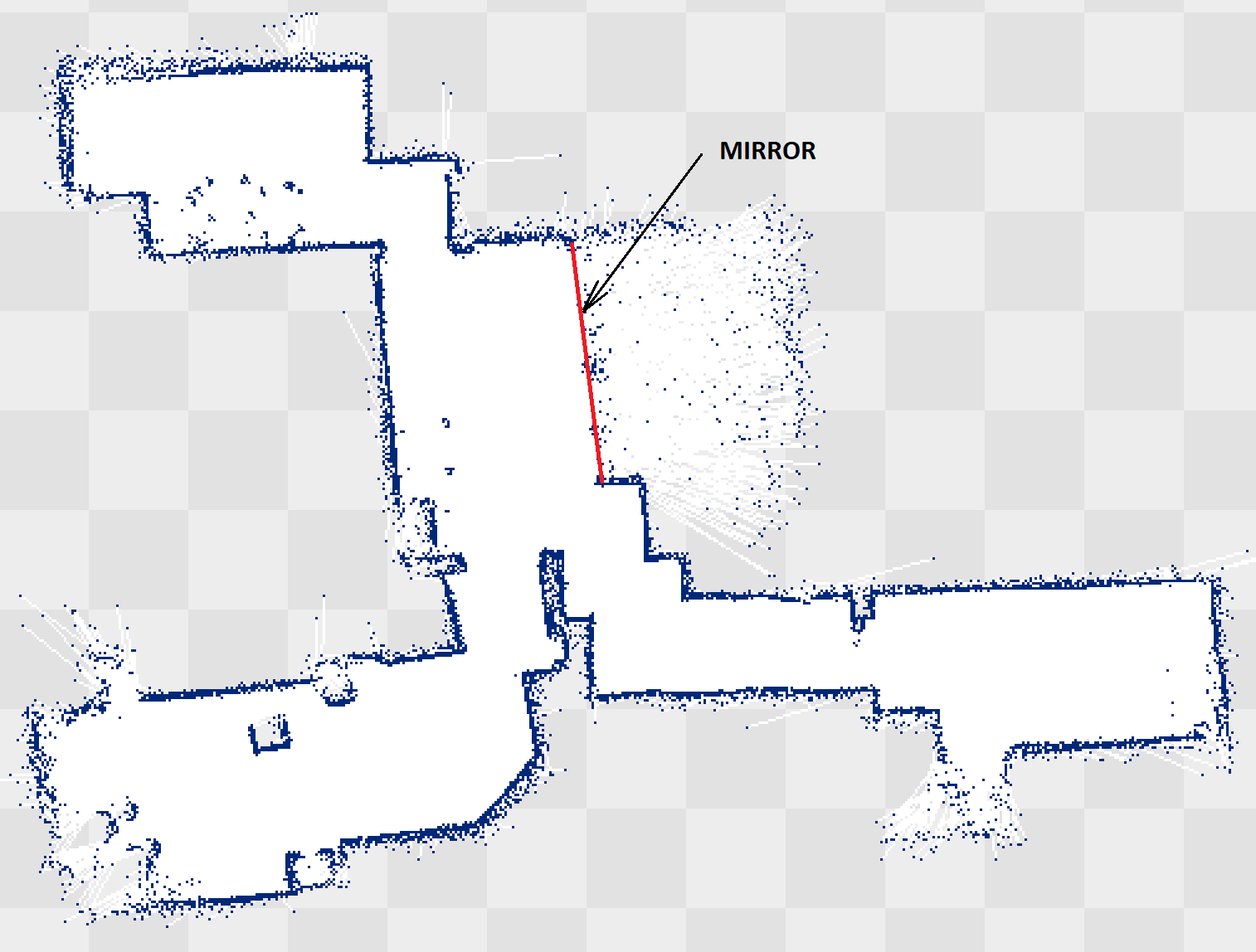
Using the mutualpromotion mechanism between pose and map, a crosscorrection LiDAR SLAM method is proposed for constructing a highaccuracy 2D map of problematic scenarios In the proposed method, the initial pose is corrected to promote rough mapping, and then the correction of the rough map can provide feedback for the global pose optimization.
2d lidar slam. The 2D LiDAR sensors developed by OLEI have two different versions according to the horizontal scanning angles270° version and 360° version The merits of OLEI's 2D LiDAR can be demonstrated by its compact structure, performance excellency, reliability, costs, and flexibility;. In the next section, we describe how we convert 2D and 3D LIDAR data into images for feature detection In Section III, we discuss how uncertainty information—critical for SLAM systems—can be obtained In Section IV, we present experimental evaluations of our methods versus standard methods II RASTERIZATION OF LIDAR DATA. RPLIDAR M5/M6 is the enhanced version of 2D laser range scanner (LIDAR) The system can perform 2D 360degree scan within 18meter range The generated 2D point cloud data can be used in mapping, localization and object/environment modeling RPLIDAR A3 can take up to samples of laser ranging per second with high rotation speed.
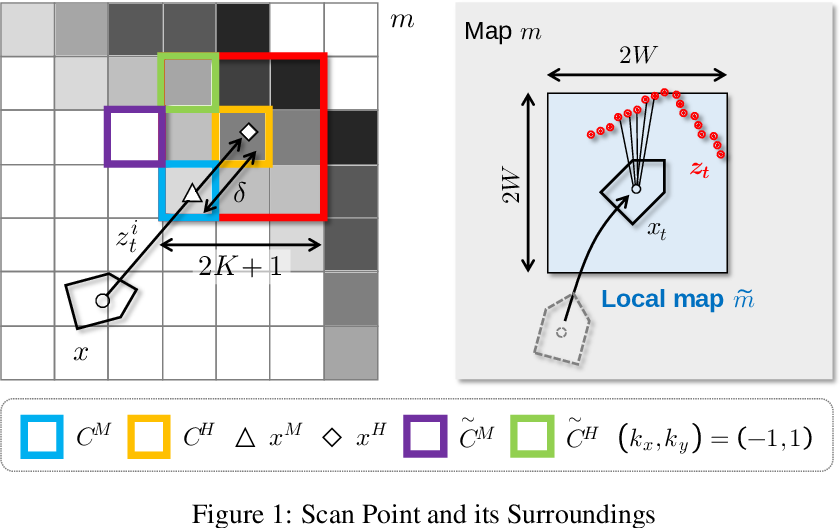
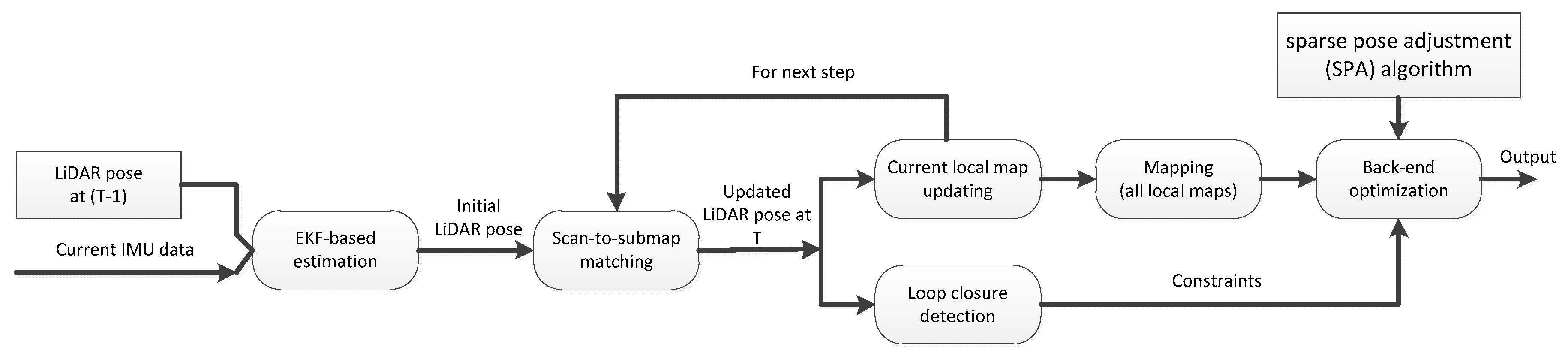
As shown in Figure 1, the R2DLIDAR system employed in this paper consists of a 2D LIDAR and a PanTilt Unit (PTU) The PTU yaws the 2D LIDAR to produce a proper R2DLIDAR The 2D LIDAR UTM30LX (Hokuyo Inc, Osaka, Japan) used in our system that can scan 270° in a plane with the angular resolution of 025°. Realtime loop closure in 2D LIDAR SLAM Abstract Portable laser rangefinders, further referred to as LIDAR, and simultaneous localization and mapping (SLAM) are an efficient method of acquiring asbuilt floor plans Generating and visualizing floor plans in realtime helps the operator assess the quality and coverage of capture data. This post is the second in a series of tutorials on SLAM using scanning 2D LIDAR and wheel odometry The other posts in the series can be found in the links below The links will be updated as work on the series progresses Intro To LIDAR SLAM and the IRC Dataset;.
Clickhere for Top 0 Raspberry pi project with 12 Categories https//wwwpantechsolutionsnet/blog/top0raspberrypiprojectsfinalyear/ In the above. A 360 Lidar is an essential component for using SLAM because it provide 360 degree distance detection information that is needed to create the 2D map Add Tip Ask Question Comment Download Step 1 Concept Design. RPLIDAR M5/M6 is the enhanced version of 2D laser range scanner (LIDAR) The system can perform 2D 360degree scan within 18meter range The generated 2D point cloud data can be used in mapping, localization and object/environment modeling RPLIDAR A3 can take up to samples of laser ranging per second with high rotation speed.
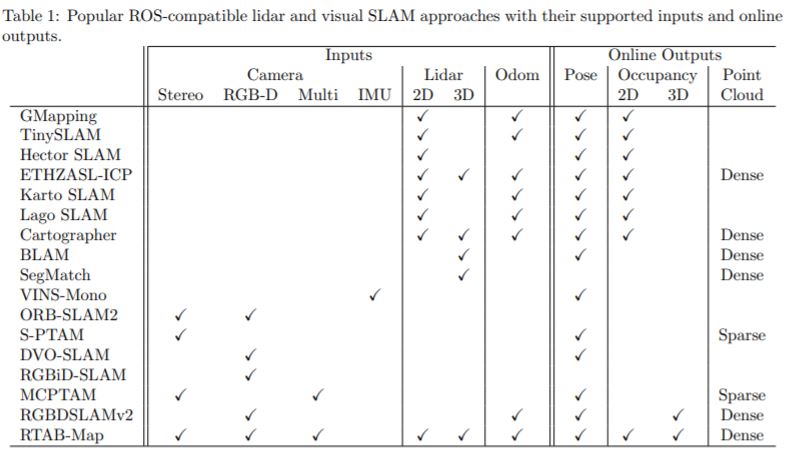
In the next section, we describe how we convert 2D and 3D LIDAR data into images for feature detection In Section III, we discuss how uncertainty information—critical for SLAM systems—can be obtained In Section IV, we present experimental evaluations of our methods versus standard methods II RASTERIZATION OF LIDAR DATA. Although the current 2D Lidarbased SLAM algorithm, including its application in indoor rescue environment, has achieved much success, the evaluation of SLAM algorithms combined with path planning for indoor rescue has rarely been studied This paper studies mapping and path planning for mobile robots in an indoor rescue environment. This article presents a SLAM system based on data recorded by a 2D LiDAR To fuse information concerning the platform’s location and its surroundings, a variant of Kalman filter together with an Iterated Closest Points (ICP) algorithm were applied.
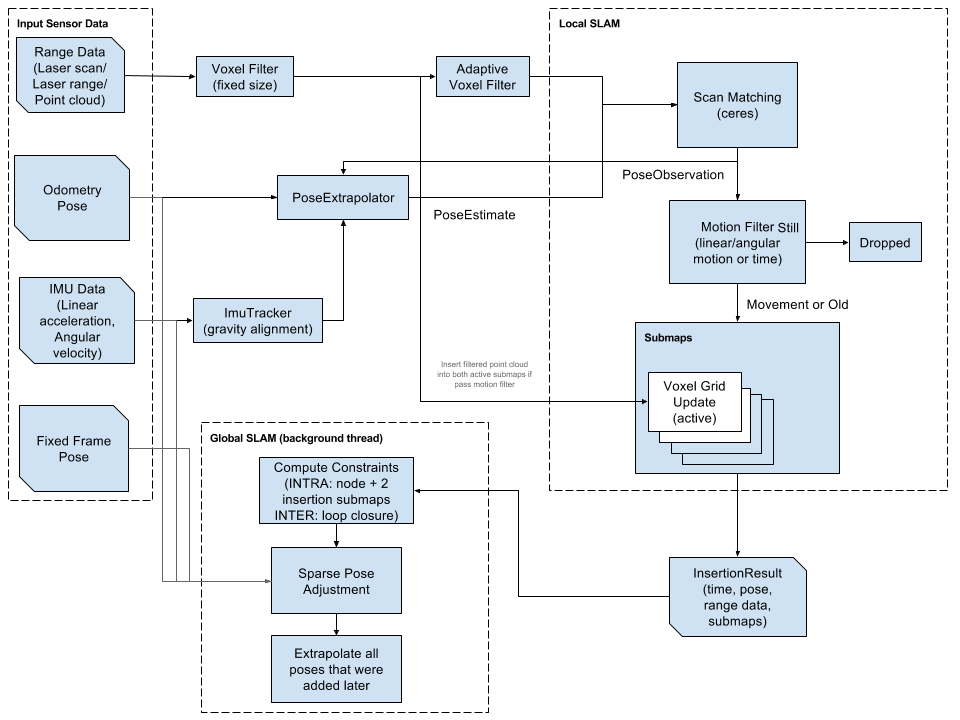
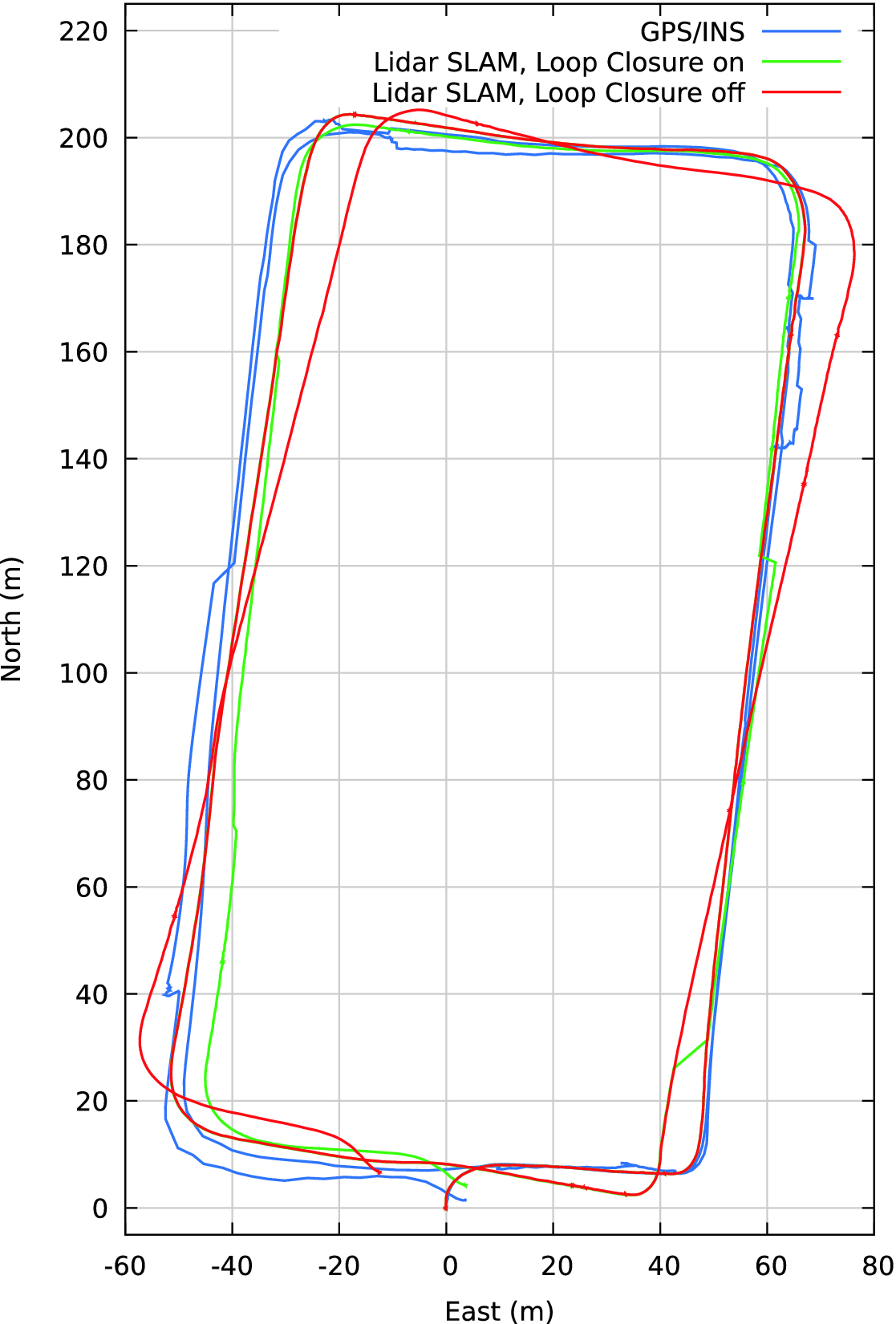
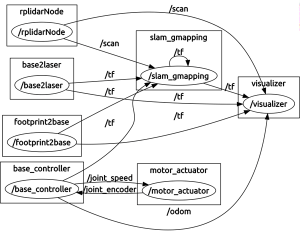
Cartographer is a system that provides realtime simultaneous localization and mapping (SLAM) in 2D and 3D across multiple platforms and sensor configurations SLAM algorithms combine data from various sensors (eg lidar , IMU , and cameras) to simultaneously compute the position of the sensor and a map of the sensor’s surroundings. Cartographer is a system that provides realtime SLAM (simultaneous localization and mapping In other words using information from lidar and other sensors Cartographer can build a map of. Modern State of the Art Systems 18 Sparse SLAM Only use a small selected subset of the pixels (features) from a monocular color camera Fast and real time on CPU but it produces a sparse map (point clouds) Landmarkbased or featurebased representations ORB SLAM One of the SOTA frameworks in the sparse SLAM category Complete SLAM.
However, in 2D Light Detection and Ranging (LiDAR) SLAM, on one hand, it is relatively difficult to extract distinctive features in LiDAR scans for loop closure detection, as 2D LiDAR scans encode much less information than images;. So It might be helpful for newbies to understand overall MCL procedures Originally, it is RE510 materials at KAIST implemented by Seungwon Song as a TA. On the other hand, there is also some special mapping scenery, where no loop closure exists.
The main goal of SLAM is to construct and update a map of an unknown environment while simultaneously keeping track of the LiDAR’s location within it Velodyne’s Lidar sensors capture a full 360° 3D scan, up to times per second Each scan holds 16/32/64 scanlines, depending on the particular device. Where the other 2D LiDAR sensors on the market are less expensive, they require some knowledge of robotics to get your SLAM working NaviPack, for a small price increase, promises truly plugandplay SLAM “It is super easy to use,” the company says on its Indiegogo website. RealTime Loop Closure in 2D LIDAR SLAM Wolfgang Hess1, Damon Kohler, Holger Rapp, Daniel Andor1 Abstract Portable laser rangenders, further referred to as LIDAR, and simultaneous localization and mapping (SLAM) are an efcient method of acquiring asbuilt oor plans.
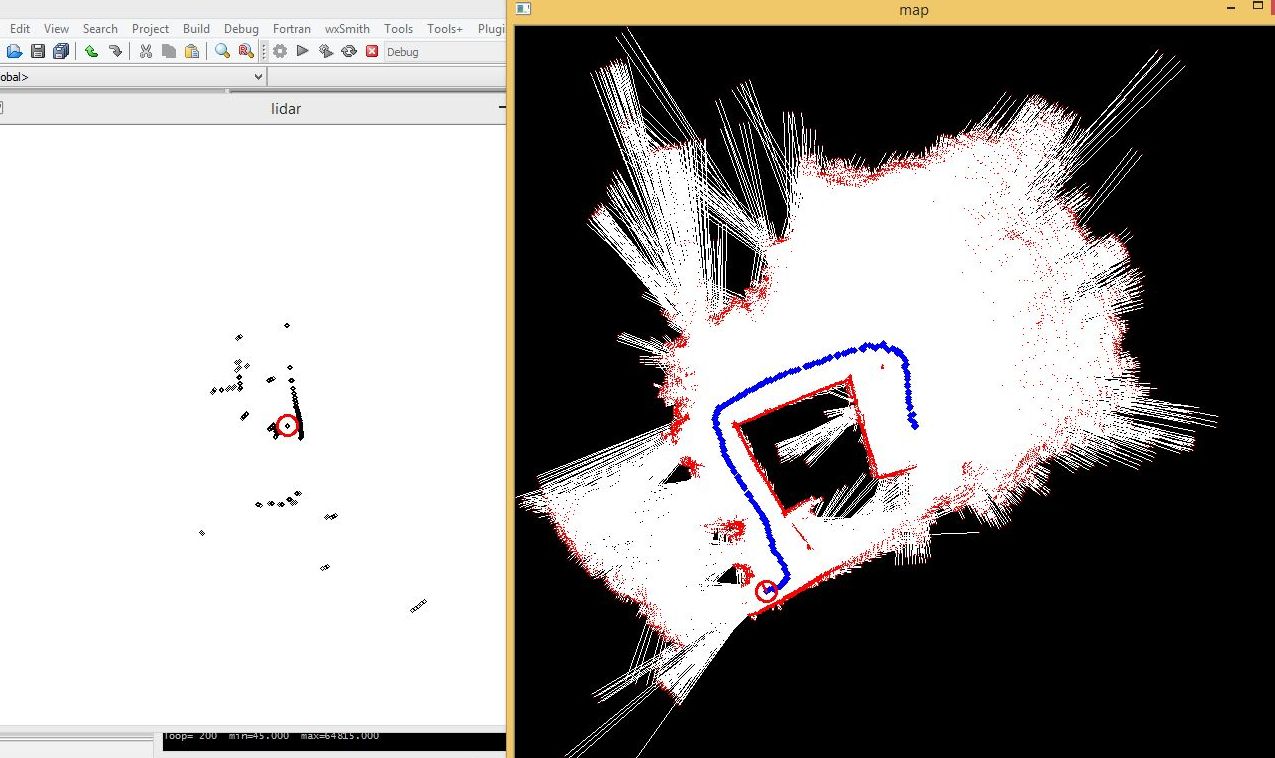
Essential 2D LiDAR for industrial robots and factory automation Also, it allows the robot to identify its position in the environment (SLAM) Compact Size and LowCost LiDAR Play video GL3 can be applied to robots, drones, industrial automation such as area detection system by embedding SW functions Apply LiDAR wherever you want !. RPLIDAR A1 is a low cost 360 degree 2D laser scanner (LIDAR) solution developed by SLAMTEC The system can perform 360degree scan within 6meter range The produced 2D point cloud data can be used in mapping, localization and object/environment modeling RPLIDAR A1’s scanning frequency reached 55 hz when sampling 360 points each round. These codes are implemented only using OpenCV library!.
TPS series slam radar range measurment sensor is a small, economical 2D laser scanning lidar newly developed by our company It integrated our fiber compression patent, electromagnetic noncontact rotary patent, passive photoelectric coding patent and other technologies It can detect any objects in the 360 degrees and 5 meters or 10m around. Portable laser rangefinders, further referred to as LIDAR, and simultaneous localization and mapping (SLAM) are an efficient method of acquiring asbuilt floor plans Generating and visualizing floor plans in realtime helps the operator assess the quality and coverage of capture data. One of the supporting technologies is SLAM (Simultaneous Localization and Mapping) SLAM is a technology that can estimate the position of the device itself while creating a map of the surrounding environment based on information obtained from sensors such as cameras and LiDAR attached to moving objects (robots and machines).
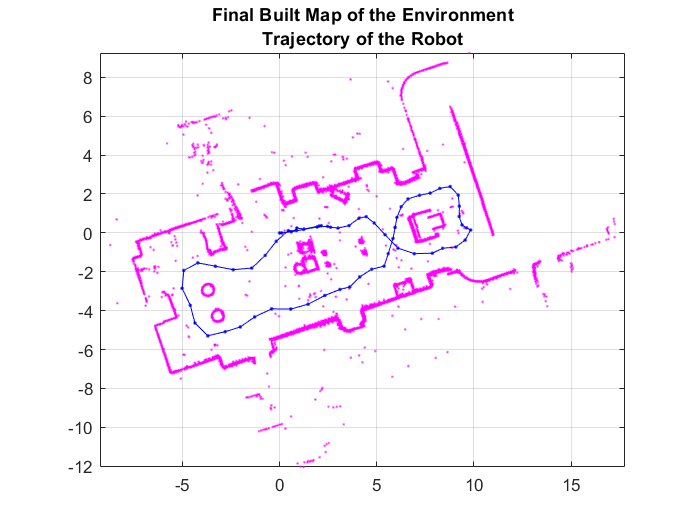
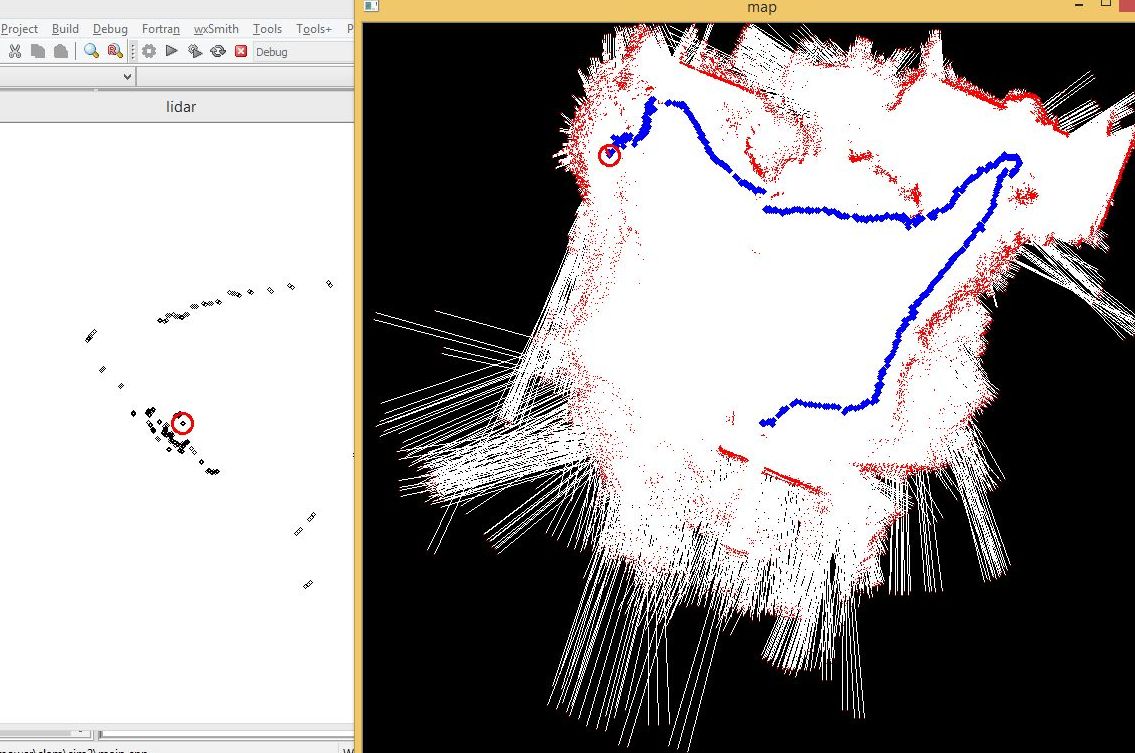
0 Introduction You have just started learning SLAM for nearly a month, but you don't know much about the theoretical derivation So you have developed a simple demo of 2D LiDAR SLAM on matlab to understand the complete process of SLAM (1) Data source 2D laser SLAM data from Deutsches Museum, UTF8. The main goal of SLAM is to construct and update a map of an unknown environment while simultaneously keeping track of the LiDAR’s location within it Velodyne’s Lidar sensors capture a full 360° 3D scan, up to times per second Each scan holds 16/32/64 scanlines, depending on the particular device. For applications such as warehouse robots, 2D lidar SLAM is commonly used, whereas SLAM using 3D lidar point clouds can be used for UAVs and automated parking SLAM with 2D LiDAR SLAM with 3D LiDAR Common Challenges with SLAM.
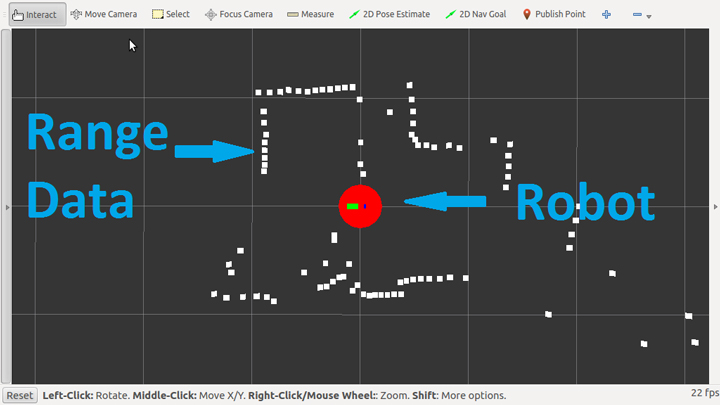
LIDAR is an interesting and versatile sensor In many ways 2D LIDAR measurements are very similar to the measurements we used in the UTIAS dataset in my EKF SLAM tutorial As with the UTIAS dataset, the measurement model is simply the range and bearing to the measured landmark or obstacle. Simultaneous localization and mapping (SLAM) using two line lasers and an IMU. With the development of laser technology, 2D Lidar has been widely used in various fields such as map navigation 1,2, simultaneous localization and mapping (SLAM) 3, 4 and robots 5,6.
Portable laser rangefinders, further referred to as LIDAR, and simultaneous localization and mapping (SLAM) are an efficient method of acquiring asbuilt floor plans Generating and visualizing floor plans in realtime helps the operator assess the quality and coverage of capture data Building a portable capture platform necessitates operating under limited computational resources. RealTime Loop Closure in 2D LIDAR SLAM Wolfgang Hess1, Damon Kohler, Holger Rapp, Daniel Andor1 Abstract—Portable laser rangefinders, further referred to as LIDAR, and simultaneous localization and mapping (SLAM) are an efficient method of acquiring asbuilt floor plans. 2D Lidar SLAM Implement Simultaneous Localization and Mapping (SLAM) algorithms from 2D lidar scans Estimate positions and create binary or probabilistic occupancy grids using real or simulated sensor readings Simultaneous Localization and Mapping (SLAM) with Lidar Scans.
Posegraph optimizition based SLAM with 2D scan matching abstraction This will allow the user to create and update existing maps, then serialize the data for use in other mapping sessions, something sorely lacking from most SLAM implementations and nearly all planar SLAM implementations. On the other hand, there is also some special mapping scenery, where no loop closure exists. RPLIDAR A1 is a low cost 360 degree 2D laser scanner (LIDAR) solution developed by SLAMTEC The system can perform 360degree scan within 6meter range The produced 2D point cloud data can be used in mapping, localization and object/environment modeling RPLIDAR A1’s scanning frequency reached 55 hz when sampling 360 points each round.
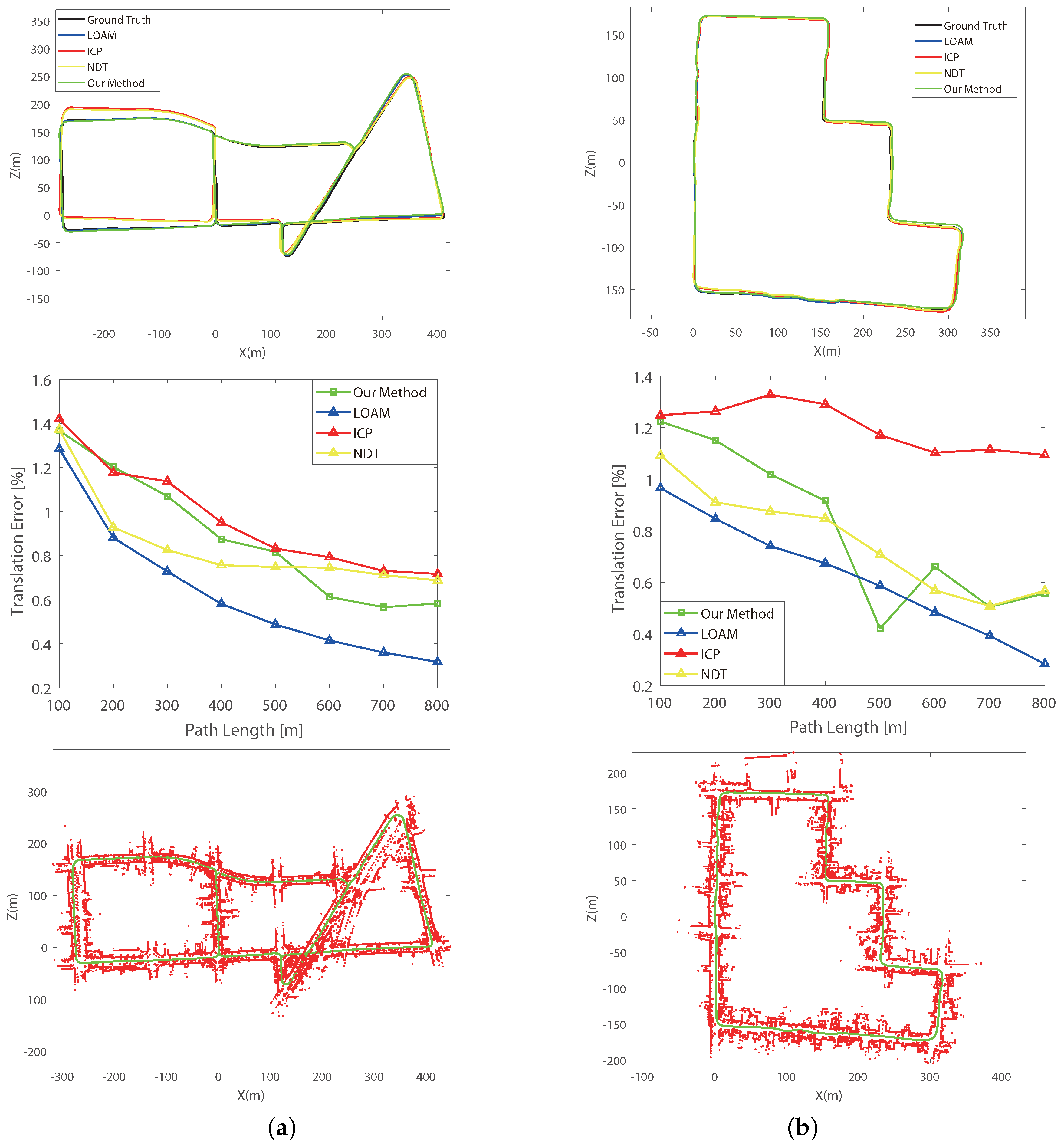
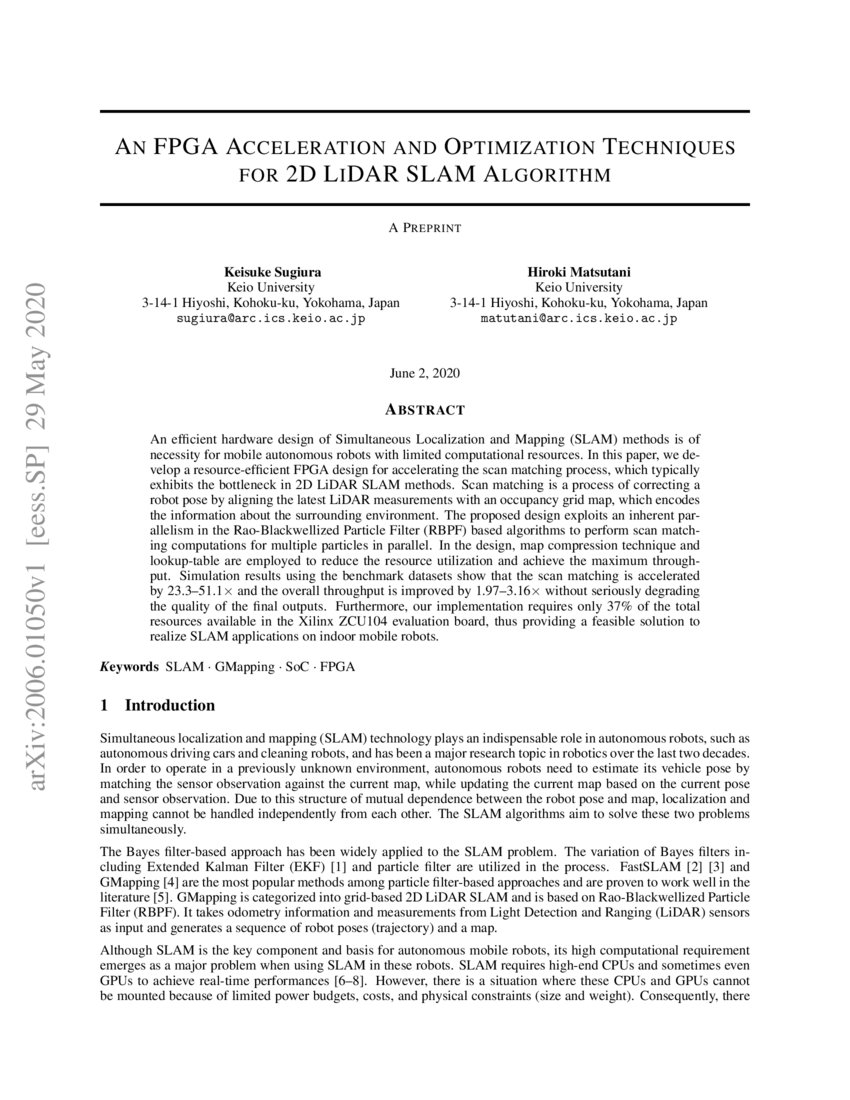
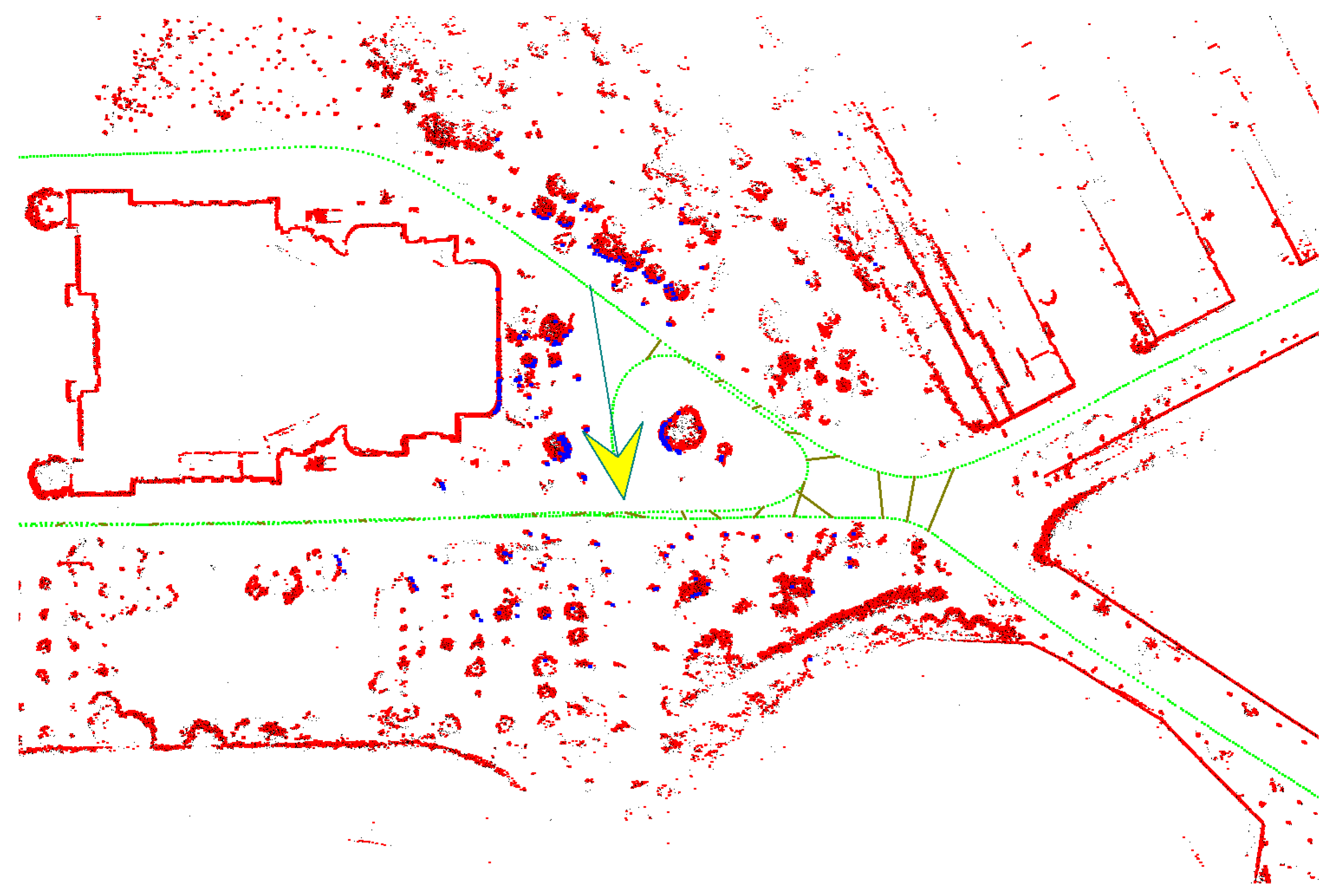
Clickhere for Top 0 Raspberry pi project with 12 Categories https//wwwpantechsolutionsnet/blog/top0raspberrypiprojectsfinalyear/ In the above. In this paper, we propose a fully automated 2D simultaneous localization and mapping (SLAM) system based on lidar working in largescale outdoor environments To improve the accuracy and robustness. 0 Introduction You have just started learning SLAM for nearly a month, but you don't know much about the theoretical derivation So you have developed a simple demo of 2D LiDAR SLAM on matlab to understand the complete process of SLAM (1) Data source 2D laser SLAM data from Deutsches Museum, UTF8.
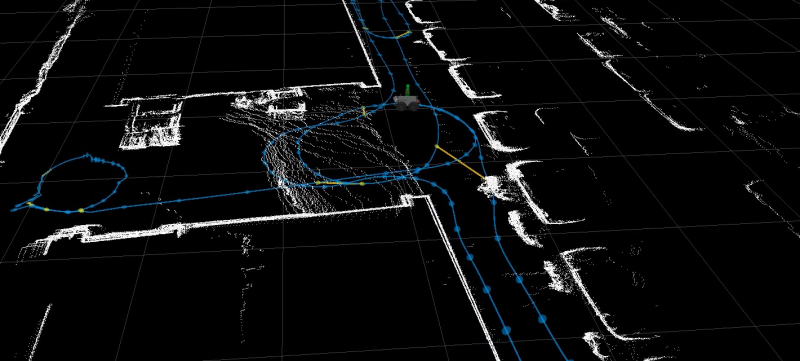
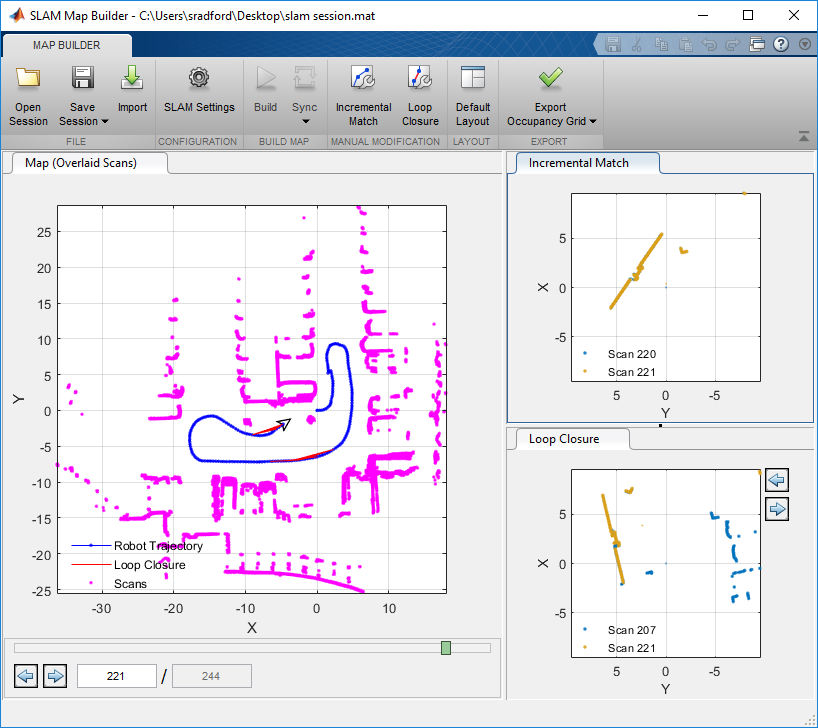
2D LiDARbased graph SLAM in lowdynamic environment. The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map. New economic sectors are raising the demand for smart media 2D LiDAR sensor solutions must keep up with these developments when it comes to functionality, size and price With the TiM2xx, SICK is launching a sensor which fulfills these new requirements Simultaneous localization and map creation (SLAM).
Modern State of the Art Systems 18 Sparse SLAM Only use a small selected subset of the pixels (features) from a monocular color camera Fast and real time on CPU but it produces a sparse map (point clouds) Landmarkbased or featurebased representations ORB SLAM One of the SOTA frameworks in the sparse SLAM category Complete SLAM. The 2D LiDAR sensors developed by OLEI have two different versions according to the horizontal scanning angles270° version and 360° version The merits of OLEI's 2D LiDAR can be demonstrated by its compact structure, performance excellency, reliability, costs, and flexibility;. Where the other 2D LiDAR sensors on the market are less expensive, they require some knowledge of robotics to get your SLAM working NaviPack, for a small price increase, promises truly plugandplay SLAM “It is super easy to use,” the company says on its Indiegogo website.
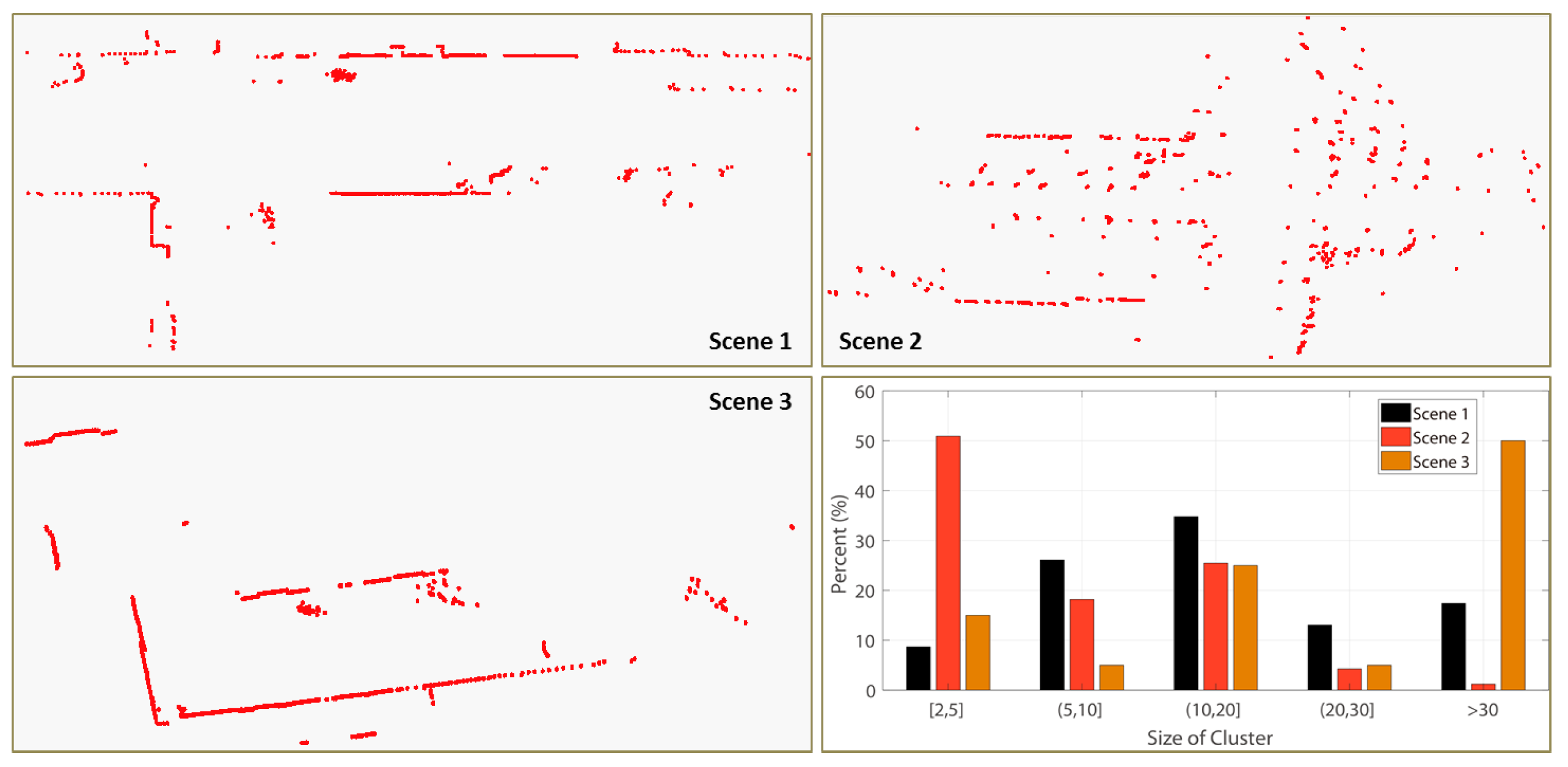
In particular, in this work we focus on largescale outdoor SLAM based on 2D lidar sensor 2D lidar sensor enjoys the merits of both highaccuracy range measurement and lowcost compared to the expensive 3D lidar scanners, making it a more suitable choice for costsensitive application scenarios. Indoor 2D/3D Scanning LiDAR, YRL series We developed the YRL series for the robotics industry and is easily optimized for any industry’s requirements with functions such as object detection, indoor mapping, SLAM, navigation. 3D LIDAR True 3D Sensing and Spinning 2D Alternatives by Tim Peckover Jan 10, 17 Blog , Robot Forge Arguably the biggest tech buzzword of the past couple years has been selfdriving, and the way the market is ramping up, that trend isn’t going to subside for quite some time – if ever.
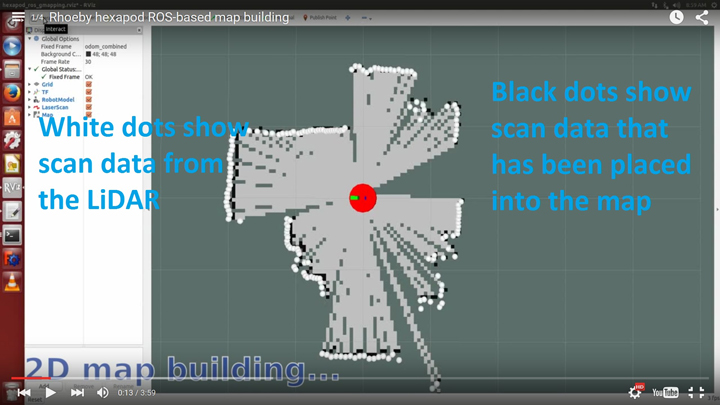
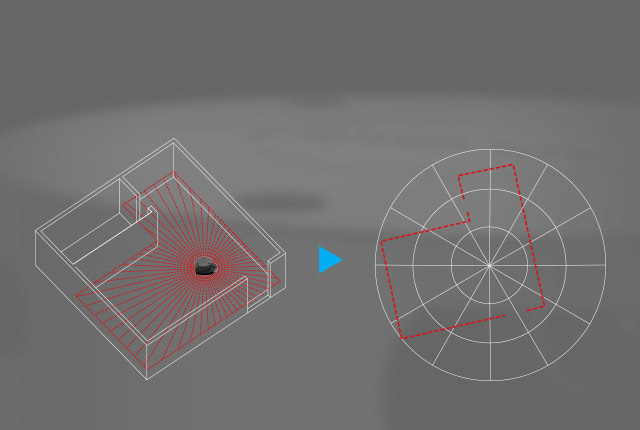
A 360 Lidar is an essential component for using SLAM because it provide 360 degree distance detection information that is needed to create the 2D map Add Tip Ask Question Comment Download Step 1 Concept Design. SLAM, in essence, a navigation technique use mostly by autonomous robot by creating a 2D map of the surrounding environment and countinously updating the map A 360 Lidar is an essential component for using SLAM because it provide 360 degree distance detection information that is needed to create the 2D map. 2D Lidar SLAM Implement Simultaneous Localization and Mapping (SLAM) algorithms from 2D lidar scans Estimate positions and create binary or probabilistic occupancy grids using real or simulated sensor readings Simultaneous Localization and Mapping (SLAM) with Lidar Scans.
Essential 2D LiDAR for industrial robots and factory automation Also, it allows the robot to identify its position in the environment (SLAM) Compact Size and LowCost LiDAR Play video GL3 can be applied to robots, drones, industrial automation such as area detection system by embedding SW functions Apply LiDAR wherever you want !. Simultaneous localization and mapping (SLAM) using two line lasers and an IMU. It meets most basic requirements of industrial applications, and is an ideal sensor for low speed navigation.
It meets most basic requirements of industrial applications, and is an ideal sensor for low speed navigation. The TiM2xx is a compact, costeffective and reliable 2D LiDAR sensor for a range of applications Its HDDM technology ensures reliable presence monitoring, localization and object detection along with maximum machine availability The installed rotatable M12 male connector allows for flexibility when installing the sensor and makes it the most compact of its kind. Although the current 2D Lidarbased SLAM algorithm, including its application in indoor rescue environment, has achieved much success, the evaluation of SLAM algorithms combined with path planning for indoor rescue has rarely been studied This paper studies mapping and path planning for mobile robots in an indoor rescue environment.
3D LIDAR True 3D Sensing and Spinning 2D Alternatives by Tim Peckover Jan 10, 17 Blog , Robot Forge Arguably the biggest tech buzzword of the past couple years has been selfdriving, and the way the market is ramping up, that trend isn’t going to subside for quite some time – if ever. The tool is designed to enable realtime simultaneous localization and mapping, better known by its acronym SLAM, and has the capability to build a 2D or 3D map while keeping track of an individual or robotic agent’s location on that map. The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map.
For autonomous driving, it is important to navigate in an unknown environment In this paper, we propose a fully automated 2D simultaneous localization and mapping (SLAM) system based on lidar working in largescale outdoor environments To improve the accuracy and robustness of the scan matching module, an improved Correlative Scan Matching (CSM) algorithm is proposed. We took a Turtlebot running ROS with 2D LiDAR, and added Kudan SLAM as a ROS navigation module Let’s look at a case without Kudan SLAM enabled We set up the robot, and manually provide it the initial pose, as required by the ACML module The robot works well, but we’ll force it to lose tracking. However, in 2D Light Detection and Ranging (LiDAR) SLAM, on one hand, it is relatively difficult to extract distinctive features in LiDAR scans for loop closure detection, as 2D LiDAR scans encode much less information than images;.
Electronics Free Full Text Large Scale Outdoor Slam Based On 2d Lidar Html

An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai
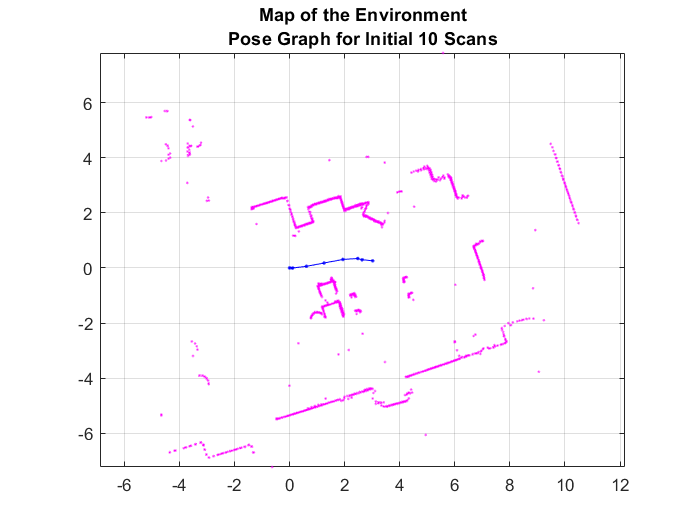
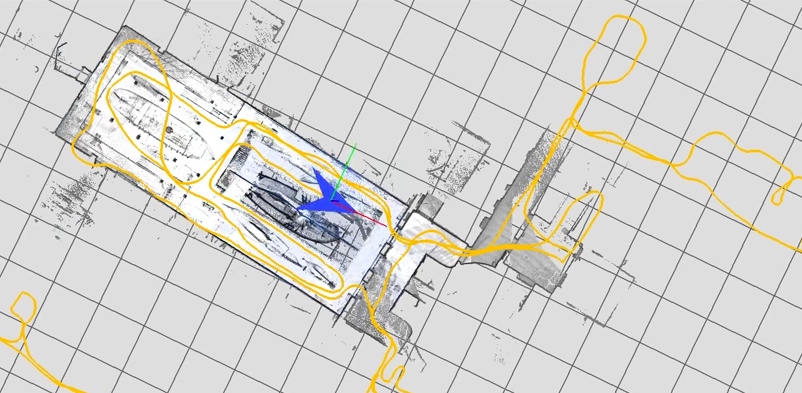
I Developed A 2d Lidar Slam Using Matlab
2d Lidar Slam のギャラリー
Utm Arc Nasa Gov Docs 17 Hening Scitech 17 0448 Pdf

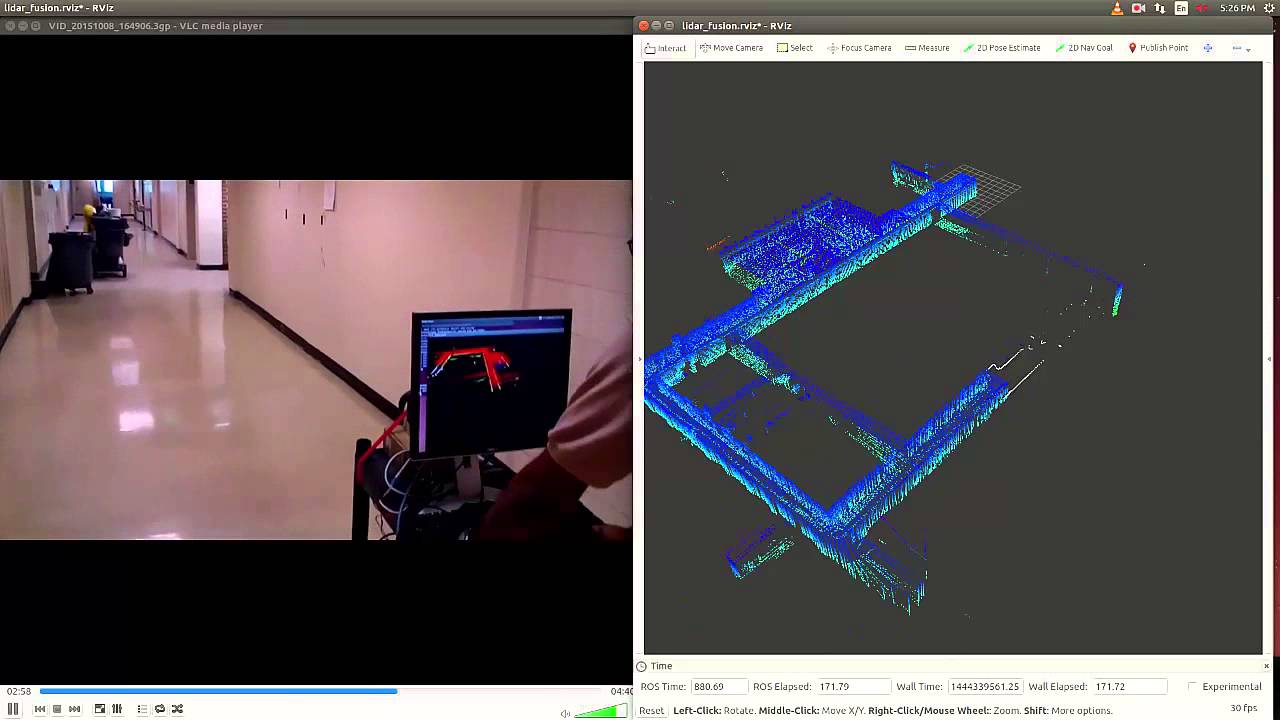
Veloview Lidar Slam Capabilities Kitware Blog

3d Slam In Dynamic Indoor Outdoor Environment Using A Tilted 2d Lidar Youtube
Rplidar Outdoor Slamtec Mapper M1m1 Map Construction And Slam Positioning Tof Meters Lidar Sensor Compatible With Ros Home Automation Kits Aliexpress

Navipack 300 Lidar For Plug And Play Slam Spar 3d

Robust Gicp Based 3d Lidar Slam For Underground Mining Environment Abstract Europe Pmc
Real Time Lidar For 3d Mapping With Slam Youtube

Cartographer On Radish Dataset 2d Laser Tuning Issue 1197 Cartographer Project Cartographer Ros Github

Supercharge Your 2d Lidar Ros Robot With Kudan Visual Slam Kudan Global
Hovermap Powerful Slam For Drone Autonomy And Lidar Mapping Spar 3d
Feature Article Products Related To Slam Technology Visual Slam Lidar Slam Tegakari An Information Transmission Media For Research And Development

R2d Lidar Rhoeby Dynamics

Mapping Forests Using An Unmanned Ground Vehicle With 3d Lidar And Graph Slam Sciencedirect
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data

Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
Pdf An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Semantic Scholar

An Easy Tutorial On Lidar Odometry Using Iterative Closest Pointbot Blog

An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai

Rtab Map As An Open Source Lidar And Visual Simultaneous Localization And Mapping Library For Large Scale And Long Term Online Operation Labbe 19 Journal Of Field Robotics Wiley Online Library

Plug And Play Slam A Unified Slam Architecture For Modularity And Ease Of Use
Research Google Com Pubs Archive Pdf
Maps And Ugv Trajectories Recovered From 2d Lidar Slam Methods Download Scientific Diagram

Real Time Lidar For 2d 3d Slam Youtube
Pau Perception And Action Under Uncertainity
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

Slam 360 2d Lidar Laser Radar Scanner Lidar Sensor Distance Detection Black Us Ebay

Lidar Integration With Ros Quickstart Guide And Projects Ideas

Real Time Slam For Mms Positioning Extraction Of A 2d Scan From The Download Scientific Diagram
Navipack 2d Lidar For Robots Robotic Gizmos

Laser Slam Two Dimensional Frame Finishing Mind Map Programmer Sought
Algorithm Walkthrough For Tuning Cartographer Ros Documentation
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing

The Overview Of The Proposed Slam System Based On Monocular Vision And Download Scientific Diagram

What Is Slam Simultaneous Localization And Mapping Matlab Simulink Matlab Simulink

Smartfly Ydlidar X2l Low Cost 2d Laser Radar Scanner Ranging Sensor Module For Ros Slam Robot Indoors Smart Remote Control Aliexpress
Applied Sciences Free Full Text Imu Assisted 2d Slam Method For Low Texture And Dynamic Environments Html

Figure 1 From Real Time Loop Closure In 2d Lidar Slam Semantic Scholar

Figure 2 From Elastic Lidar Fusion Dense Map Centric Continuous Time Slam Semantic Scholar
Open Simple Lidar Hackaday Io

Visual Slam Principle With 2d And 3d Key Frame Mapping And Download Scientific Diagram

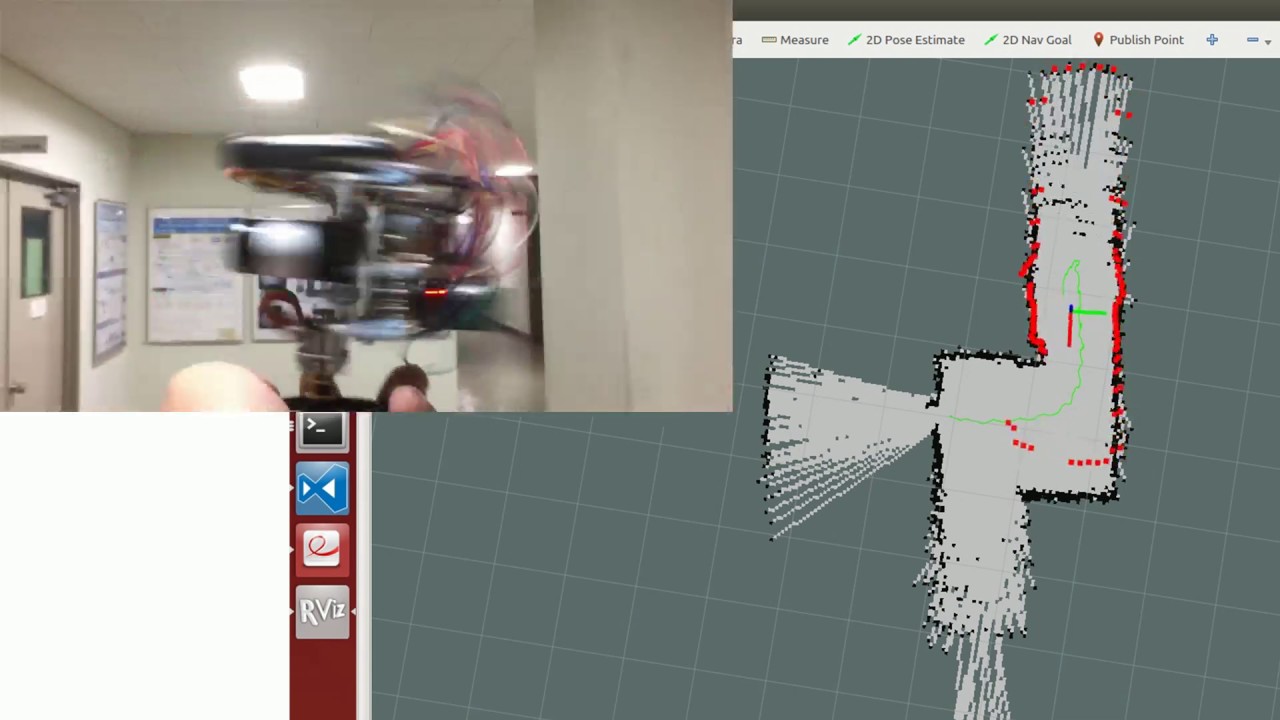
Demo For 2 D Lidar Based Slam Low Cost Rplidar Youtube
Pdf Large Scale Outdoor Slam Based On 2d Lidar

Fast Planar Surface 3d Slam Using Lidar Sciencedirect
Q Tbn And9gcstptchj08rdcq0qek7qahxhp2vrja8lx1v4qu34wt Cbs6qj Usqp Cau
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing
Building Maps Using Google Cartographer And The Os1 Lidar Sensor Ouster
An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai

Smt Slam A Novel Scan And Match Technique For 2d Manualzz

Rapid Outdoor Indoor 3d Mapping With A Husky Ugv Clearpath Robotics
Lidar Slam Positioning Quality Evaluation In Urban Road Traffic Springerlink

Google Cartographer 2d Slam With Sick Tim Lidar And Xsens Imu Youtube
What Is Different Rgbd Slam Vs Rtab Map Slam Ros Answers Open Source Q A Forum

An Easy Tutorial On Lidar Odometry Using Iterative Closest Pointbot Blog
Www Scitepress Org Papers 17 Pdf
Github Jan Xu 2d Slam 2d Slam Using An Extended Kalman Filter On Lidar And Ins Data
Ouster Os 1 Lidar And Google Cartographer Integration
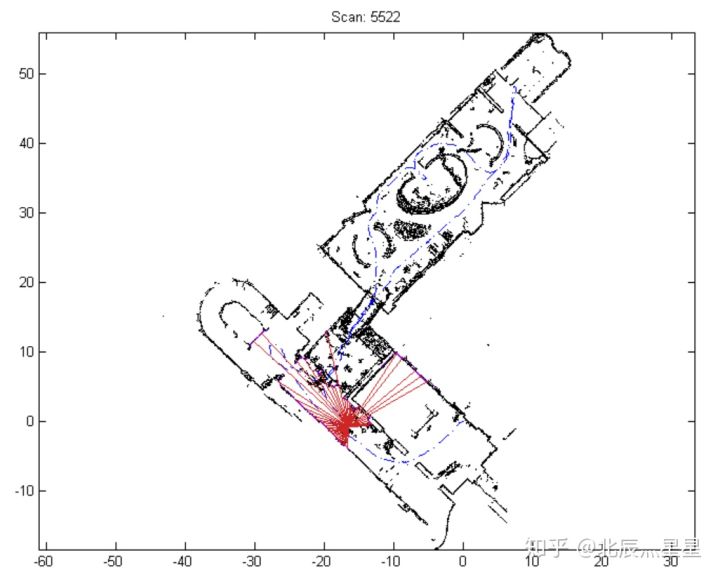
I Developed A 2d Lidar Slam Using Matlab
Diy 360 Degree Realtime Outdoor Lidar With Ros Support Graulidar Work Is Playing
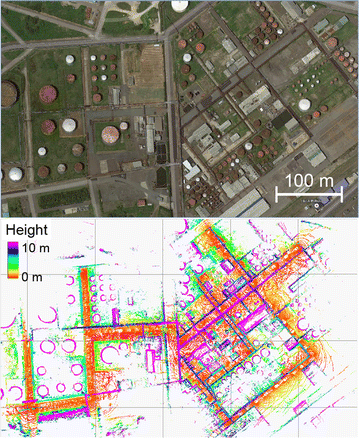
Consistent Map Building In Petrochemical Complexes For Firefighter Robots Using Slam Based On Gps And Lidar Robomech Journal Full Text
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow
Turtlebot3

Ydlidar G4 Lidar Laser Rangefinder 2d Laser Scanner For Ros Slam Robot Indoors Electronics Amazon Com
Applied Sciences Free Full Text Imu Assisted 2d Slam Method For Low Texture And Dynamic Environments Html

Figure 2 From Real Time Loop Closure In 2d Lidar Slam Semantic Scholar

Demo For 2 D Lidar Based Slam Low Cost Rplidar Youtube
Research Google Com Pubs Archive Pdf
Arxiv Org Pdf 1811

2d Lidar Based Graph Slam In Low Dynamic Environment Youtube
Electronics Free Full Text Large Scale Outdoor Slam Based On 2d Lidar Html

Elecrow Ydlidar X4 360 Degree 2d Lidar Ranging Sensor For Ros Robot Slam 3d Reconstruction Module Ranging Range 0 12 10m Sensors Aliexpress
Rplidar And Ros Programming The Best Way To Build Robot Latest Open Tech From Seeed Studio
Electronics Free Full Text Large Scale Outdoor Slam Based On 2d Lidar Html

Ydlidar X4 360 Degree 10 Meter 2d Lidar
Frc Ri Cmu Edu Zhangji Publications Icra 15 Pdf
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

2d Lidar Based Slam And Path Planning For Indoor Rescue Using Mobile Robots

Cartographer 2d Slam Bad Results Issue 4 Cartographer Project Cartographer Ros Github
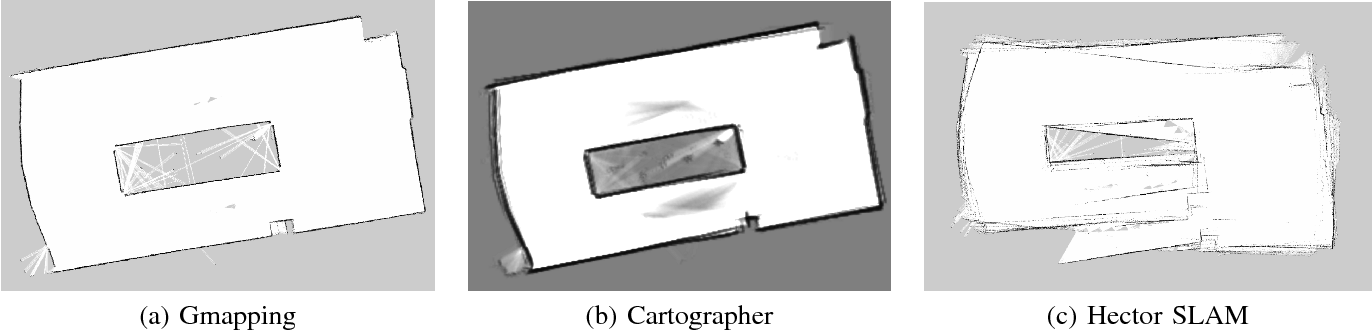
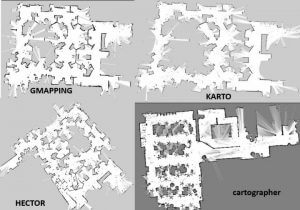
Map Comparison Of Lidar Based 2d Slam Algorithms Using Precise Ground Truth Semantic Scholar
Uwaterloo Ca Geospatial Sensing Sites Ca Geospatial Sensing Files Uploads Files Gong Lin Zhang Etal Li Isprs Pdf

Rp Lidar Low Cost 5hz 360 Deg Lidar Robopeak

A Cross Correction Lidar Slam Method For High Accuracy 2d Mapping Of Problematic Scenario Sciencedirect
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow
Google Releases Lidar Slam Algorithms Teases Innovative Mapping Solution Spar 3d
Slam With Lidar Lite V3 Hector Mapping Youtube
Rplidar A1 360 Laser Range Scanner Domestic Laser Range Scanner Slamtec
Www Ri Cmu Edu Wp Content Uploads 18 11 Main Pdf

An Fpga Acceleration And Optimization Techniques For 2d Lidar Slam Algorithm Deepai
Electronics Free Full Text Large Scale Outdoor Slam Based On 2d Lidar Html
2d Mapping Result In 7f Of Iis Building A The 2d Slam Results B The Download Scientific Diagram
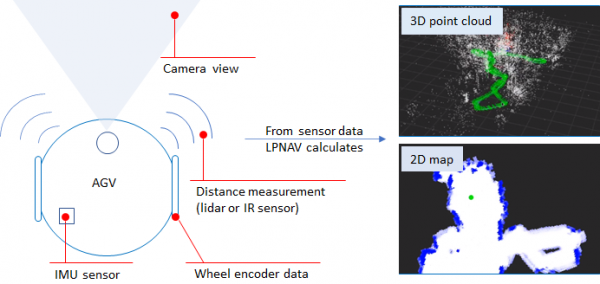
Lpnav Outdoor Operation And 2d Map Building For Automatic Guided Vehicles Agv Lp Research
Www Ri Cmu Edu Wp Content Uploads 18 11 Main Pdf
Self Driving Robot Navigation Methodology Explained
Rplidar And Ros Programming The Best Way To Build Robot Latest Open Tech From Seeed Studio
Supercharge Your 2d Lidar Ros Robot With Kudan Visual Slam Kudan Global
Electronics Free Full Text Large Scale Outdoor Slam Based On 2d Lidar Html
Www Diva Portal Org Smash Get Diva2 Fulltext01 Pdf
Build 2 D Grid Maps Using Lidar Based Slam Matlab



