Lidar Based Slam
Closures candidates for a 3D LiDARbased SLAM The idea of overlap has its origin in the photogrammetry and computer vision community 14 The intuition is that to successfully match two images and calculate their relative pose, the images must overlap This can be quantified by defining the overlap percentage as the percentage of pixels.

Lidar based slam. HOVERMAP™ Autonomous and versatile, the SLAM based mapper making data capture fast and simple Hovermap is a smart mobile scanning unit which can be hand held or mounted to a drone to provide autonomous mapping in challenging inaccessible areas Equally capable above ground or underground, indoors or out, Hovermap is your complete mobile LiDAR mapping solution. LiDAR mapping uses a laser scanning system with an integrated Inertial Measurement Unit (IMU) and GNSS receiver or in GeoSLAM’s case, the SLAM algorithm, which allows each measurement, or point in the resulting point cloud, to be georeferenced Each ‘point’ combines to create a 3D representation of the target object or area. SLAM algorithms use LiDAR and IMU data to simultaneously locate the sensor and generate a coherent map of its surroundings Companies like GeoSLAM use the same technology, but different algorithms, to power their own indoor scanning solutions As Google notes, these kinds of algorithms are a crucial part of many cuttingedge technologies.
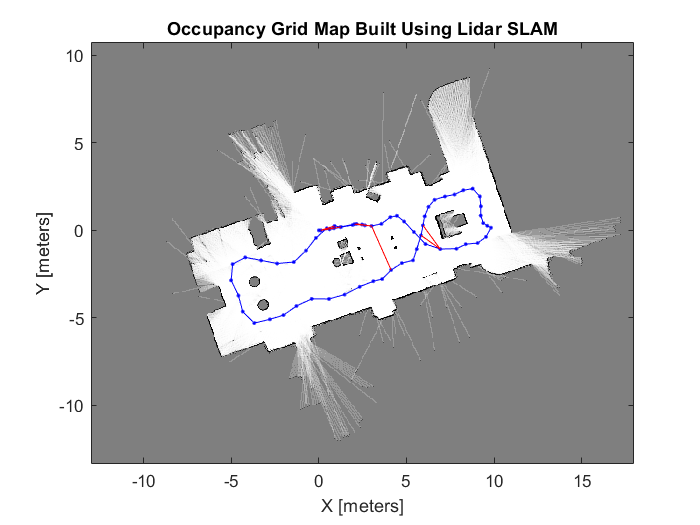
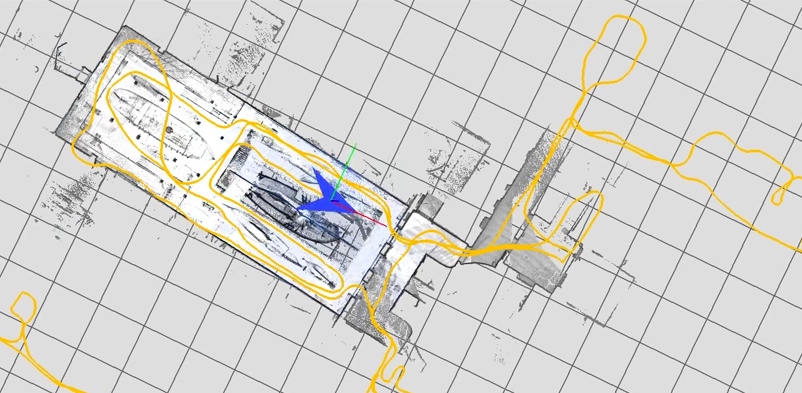
HOVERMAP™ Autonomous and versatile, the SLAM based mapper making data capture fast and simple Hovermap is a smart mobile scanning unit which can be hand held or mounted to a drone to provide autonomous mapping in challenging inaccessible areas Equally capable above ground or underground, indoors or out, Hovermap is your complete mobile LiDAR mapping solution. Description The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map. With the wide application of Lidar sensors in many fields, the lidarbased SLAM technology has also developed rapidly This paper first gives a brief overview of the application and practical significance of lidarbased SLAM technology in the fields of robotics, mapping and so on Then, we introduce the commonly used experimental platform and data for lidarbased SLAM.
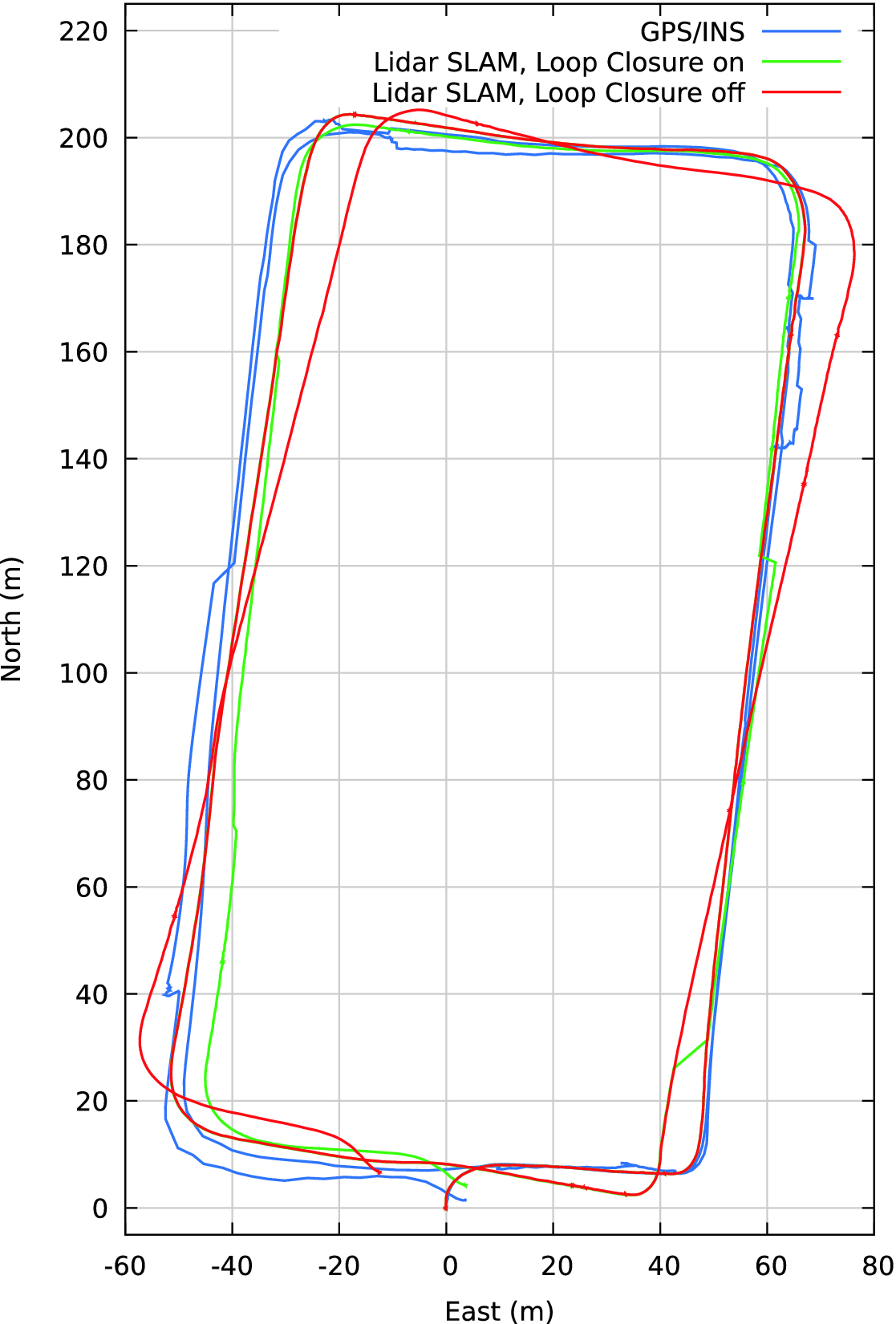
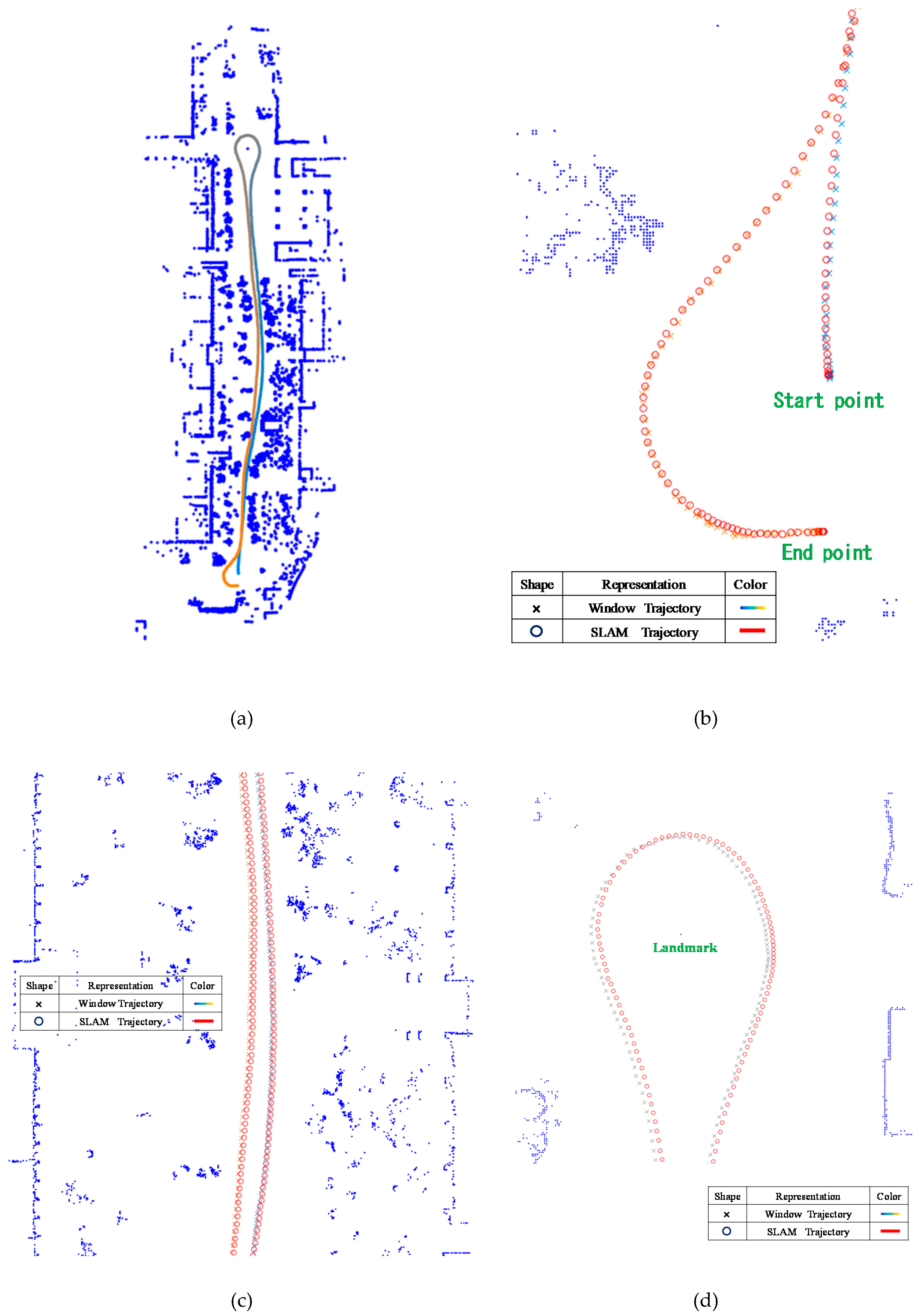
LiDAR based SLAM is mainly based on scanmatching approaches such as ICP Such algorithms have remained almost the same since its their invention thirty years ago Some experiments have been done to couple both LiDAR and visual sensors, but all of them remain at a very loose fusion level. As the basic system of the rescue robot, the SLAM system largely determines whether the rescue robot can complete the rescue mission Although the current 2D Lidarbased SLAM algorithm, including its application in indoor rescue environment, has achieved much success, the evaluation of SLAM algorithms combined with path planning for indoor rescue has rarely been studied. The SLAM Map Builder app loads recorded lidar scans and odometry sensor data to build a 2D occupancy grid using simultaneous localization and mapping (SLAM) algorithms Incremental scan matching aligns and overlays scans to build the map Loop closure detection adjusts for drift of the vehicle odometry by detecting previously visited locations and adjusting the overall map.
Efcient Continuoustime SLAM for 3D Lidarbased Online Mapping David Droeschel and Sven Behnke Abstract Modern 3D laserrange scanners have a high data rate, making online simultaneous localization and mapping (SLAM) computationally challenging Recursive state estimation techniques are efcient but commit to a state estimate. SLAM Using LIDAR And Wheel Odometry;. The process of performing localization and mapping together is commonly referred to as "Simultaneous Localization And Mapping", or just simply SLAM!.
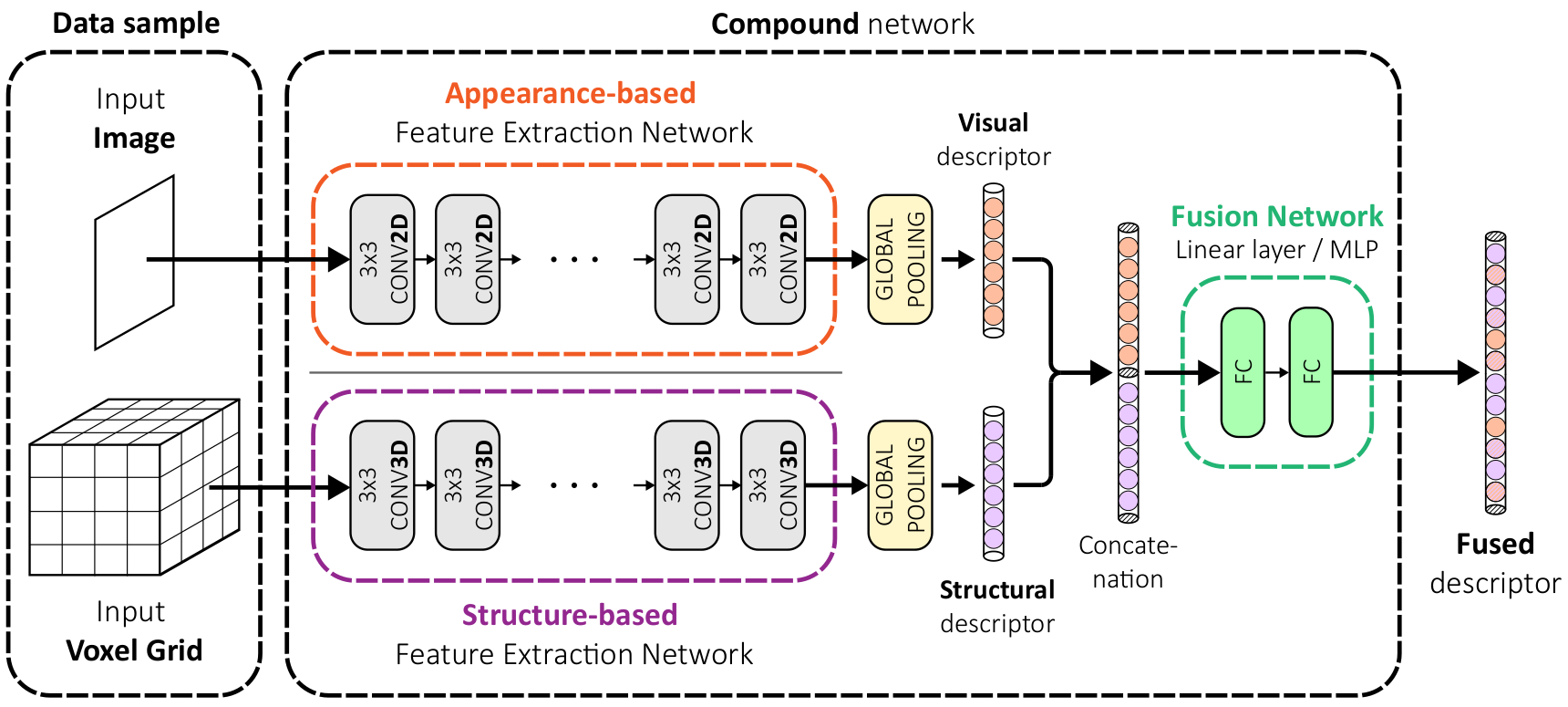
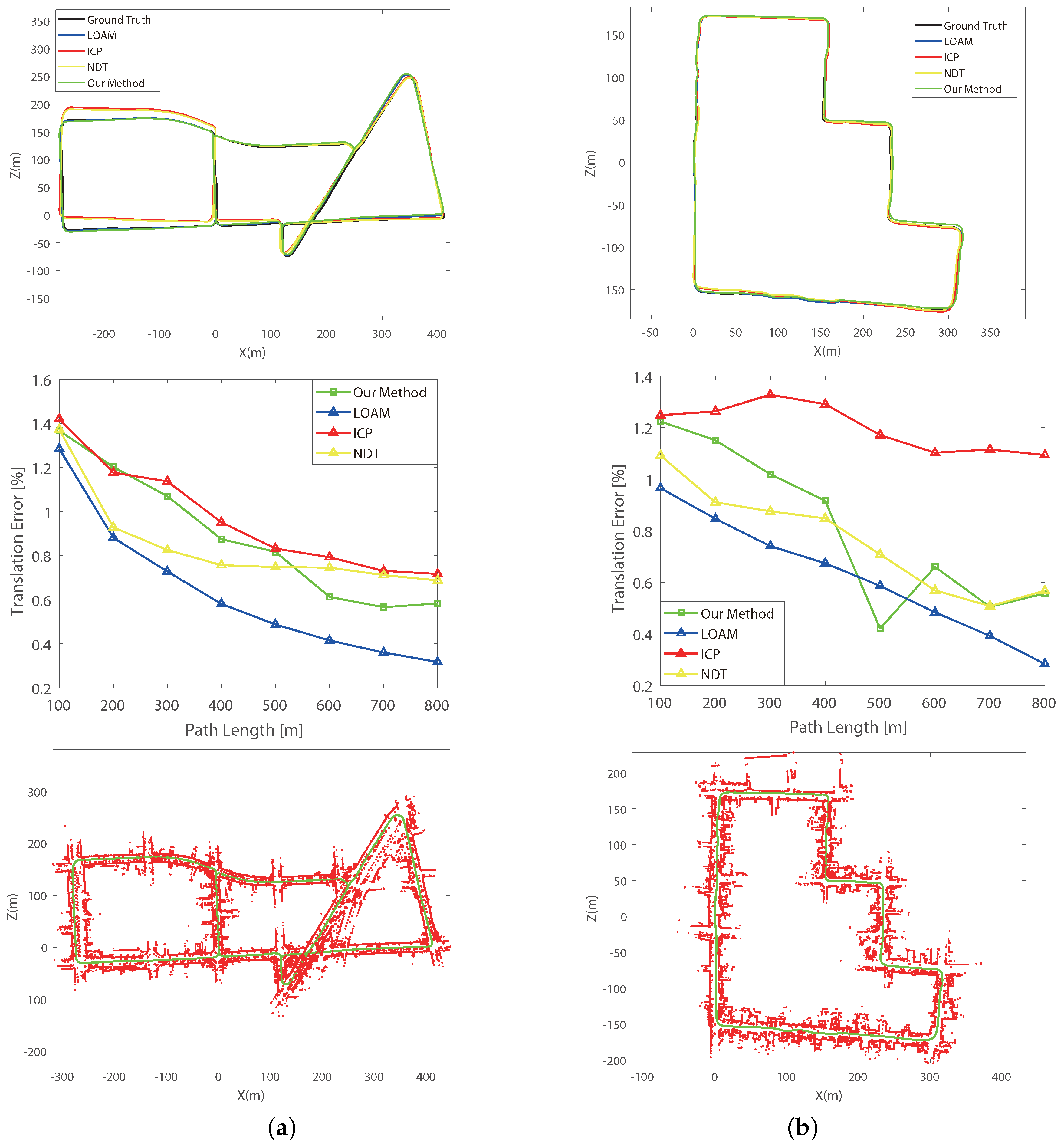
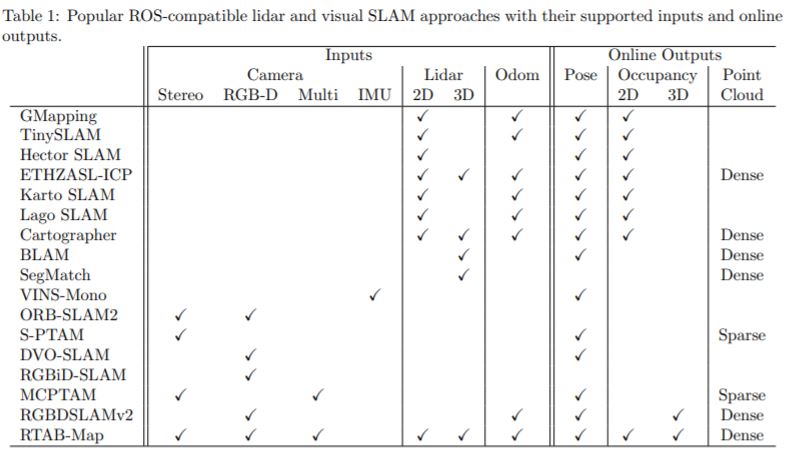
Solutions to the SLAM problem using Light Detection and Ranging (LiDAR), but these algorithms require a high computational cost However, certain environments with a specific structure allow the use of more simplified algorithms Specifically, this paper shows a SLAM algorithm where only the LiDAR signal is used and vertical planes are taken as. In contrast, LiDARbased SLAM is widely used because it can acquire accurate and reliable distance information from the surrounding environment for state estimation LiDARSLAM can be further divided into filterbased and optimizationbased method, such as Gmapping , Hector SLAM , LOAM and Cartographer etc. LiDARbased Simultaneous Localization And Mapping (SLAM), which provides environmental information for autonomous vehicles by map building, is a major challenge for autonomous driving In addition, the semantic information has been used for the LiDARbased SLAM with the advent of deep neural networkbased semantic segmentation algorithms.
Backend(graphbasedslam) pcl_localization_ros2 — ROS2 package of 3D LIDARbased Localization using the static map li_slam_ros2 — A lidar inertial slam version of lidarslam_ros2. Lidarbased SLAM vs vSLAM for robot vacuums – which one is best?. With the wide application of Lidar sensors in many fields, the lidarbased SLAM technology has also developed rapidly This paper first gives a brief overview of the application and practical significance of lidarbased SLAM technology in the fields of robotics, mapping and so on Then, we introduce the commonly used experimental platform and data for lidarbased SLAM.
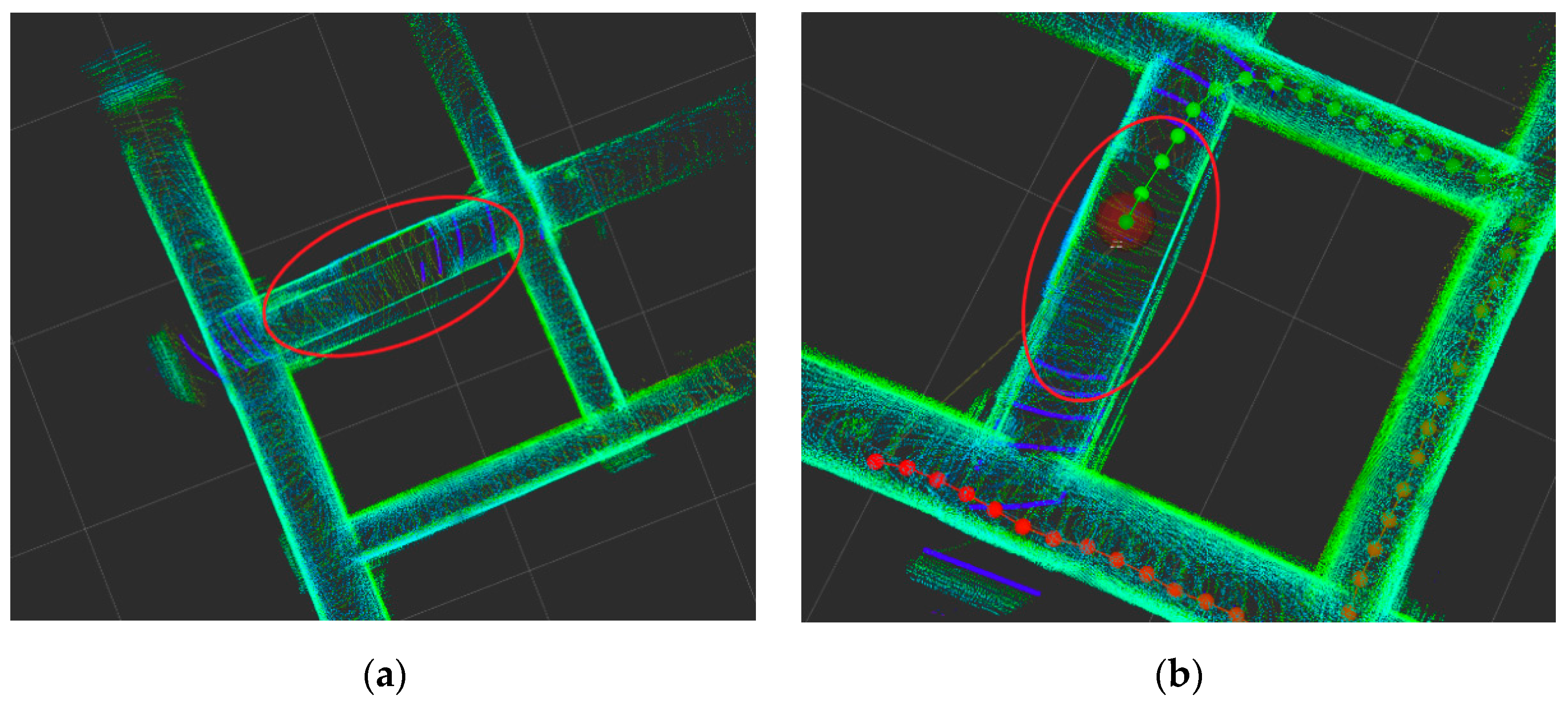
In this paper, we address the problem of loop closing for SLAM based on 3D laser scans recorded by autonomous cars Our approach utilizes a deep neural network exploiting different cues generated from LiDAR data for finding loop closures. LiDAR SLAM Light detection and ranging (lidar) is a method that primarily uses a laser sensor (or distance sensor) Compared to cameras, ToF, and other sensors, lasers are significantly more precise, and are used for applications with highspeed moving vehicles such as selfdriving cars and drones. In this paper, RadarSLAM, a full radar based graph SLAM system, is proposed for reliable localization and mapping in largescale environments It is composed of pose tracking, local mapping, loop closure detection and pose graph optimization, enhanced by novel feature matching and probabilistic point cloud generation on radar images.
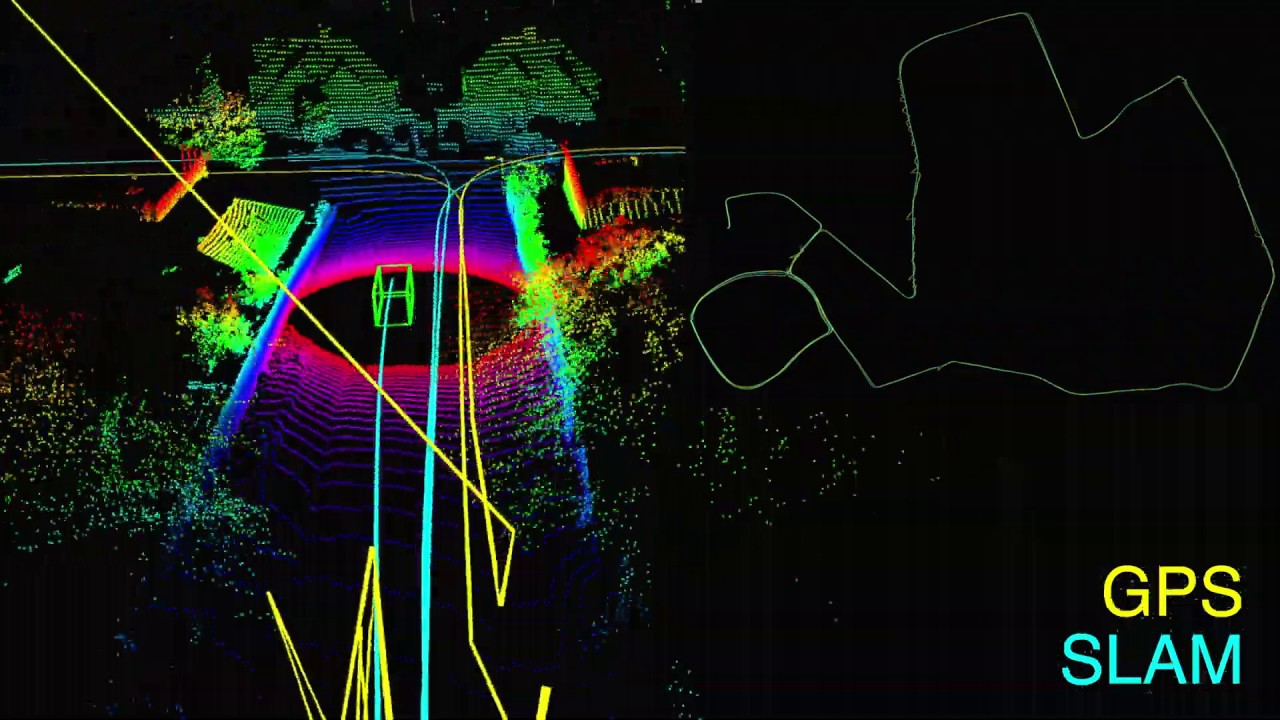
CPFGSLAMa Robust Simultaneous Localization and Mapping based on LIDAR in OffRoad Environment Abstract Simultaneous localization and mapping (SLAM), as an important tool for vehicle positioning and mapping, plays an important role in the unmanned vehicle technology This paper mainly presents a new solution to the LIDARbased SLAM for unmanned vehicles in the offroad environment. Design LidarBased SLAM Using Unreal Engine Simulation Environment. SLAM (Simultaneous Localization And Mapping) enables accurate mapping where GPS localization is unavailable, such as indoor spaces SLAM algorithms use LiDAR and IMU data to simultaneously locate the sensor and generate a coherent map of its surroundings.
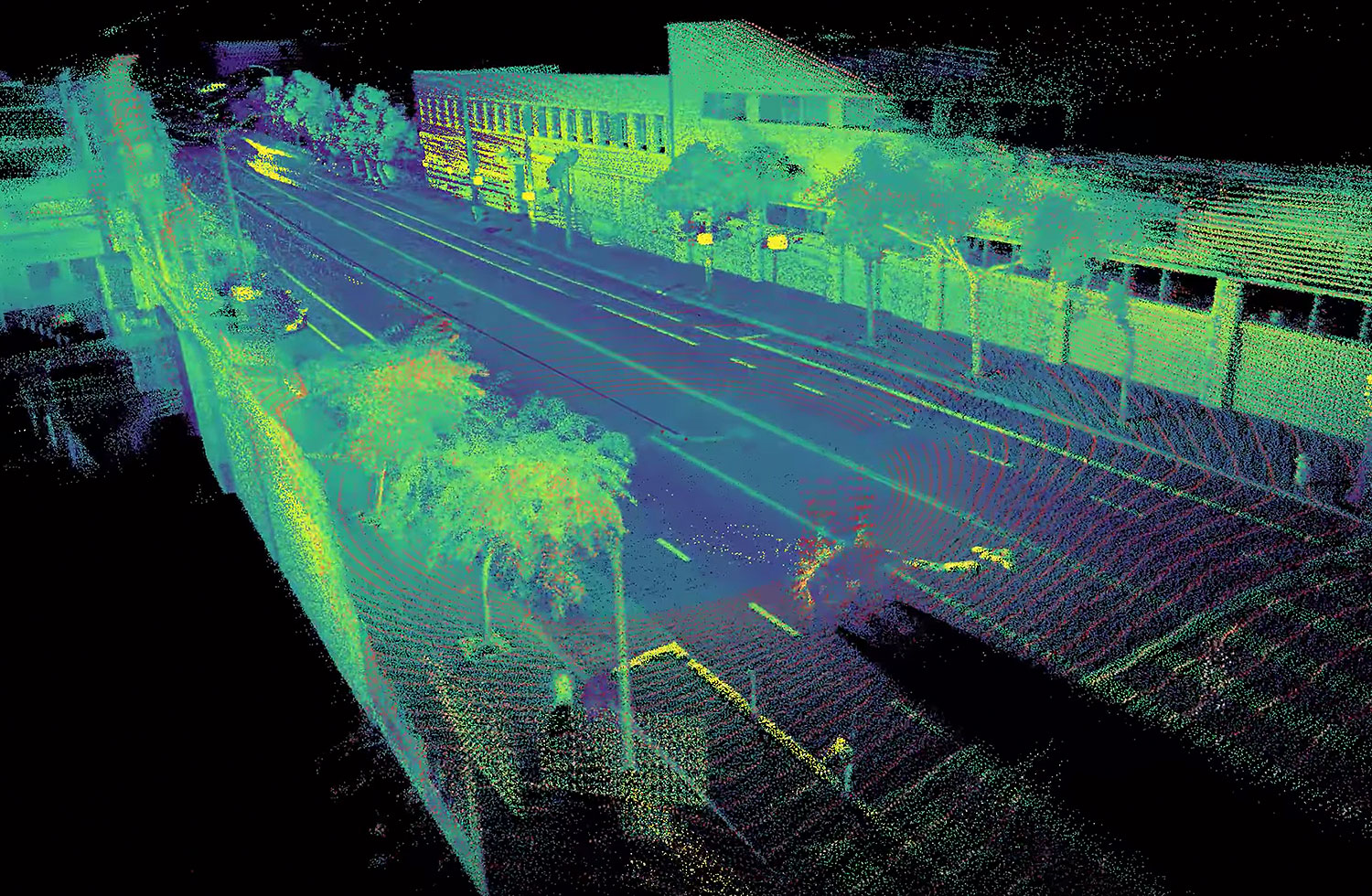
Light Detection and Ranging (LiDAR) based Simultaneous Localization and Mapping (SLAM) has drawn increasing interests in autonomous driving. Instead, we use the lidar data itself to line things up This is called simultaneous localization and mapping (SLAM) Previously, computers weren’t fast enough to run SLAM reliably with lidar data,. LiDAR mapping uses a laser scanning system with an integrated Inertial Measurement Unit (IMU) and GNSS receiver or in GeoSLAM’s case, the SLAM algorithm, which allows each measurement, or point in the resulting point cloud, to be georeferenced Each ‘point’ combines to create a 3D representation of the target object or area.
Online LiDARSLAM for Legged Robots with DeepLearned Loop Closure (ICRA ) In this paper, we present a factorgraph LiDAR SLAM system which incorporates a stateoftheart deeply learned featurebased loop closure detector to enable a legged robot to localize and map in industrial environments. French company Viametris has been an expert in 6DOF LiDARSLAM for over ten years It developed the bMS3D LD5 backpack mobile scanner for demanding land surveying applications This reality capture solution combines LiDAR sensors and one of two camera configurations either 4x pinhole cameras or 1x panoramic camera (the 30megapixel FLIR Ladybug5). In this work, a 3D lidarbased SLAM approach, named GPSLAM, is designed to address those challenges above We use regionalized GP map reconstruction to model the environment from range data, which serves as the fundamental of our approach After this, evenly distributed samples are drawn from the model and fed into a scantomap registration.
Based on vision or LiDAR sensors, great efforts have been devoted to achieving realtime SLAM that can support a robot’s state estimation However, most of the mature SLAM methods generally work under the assumption that the environment is static, while in dynamic environments they will yield degenerate performance or even fail. Simultaneous localization and mapping (SLAM) is a fundamental capability required by most autonomous systems In this paper, we address the problem of loop closing for SLAM based on 3D laser scans. LIDAR SLAM 19 hdl_graph_slam 3D LIDARbased Graph SLAM, realtime 6DOF SLAM using a 3D LIDAR 19, Advanced Robotic Systems, A Portable 3D LIDARbased System for Longterm and Widearea People Behavior Measurement, Advanced Robotic Systems PAPER LIOmapping ICRA 19,A Tightly Coupled 3D Lidar and Inertial Odometry and Mapping Approach PAPER, CODE SuMa IROS 19, SuMa Efficient LiDARbased Semantic SLAM PAPER, CODE ALOAM.
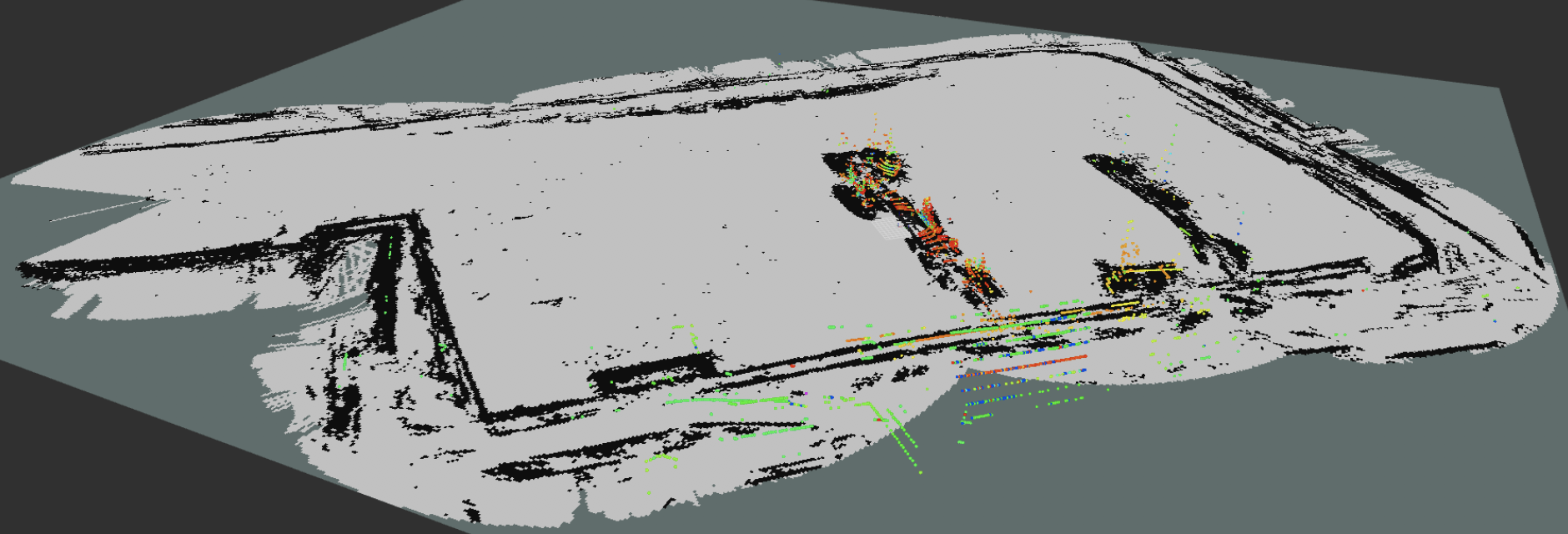
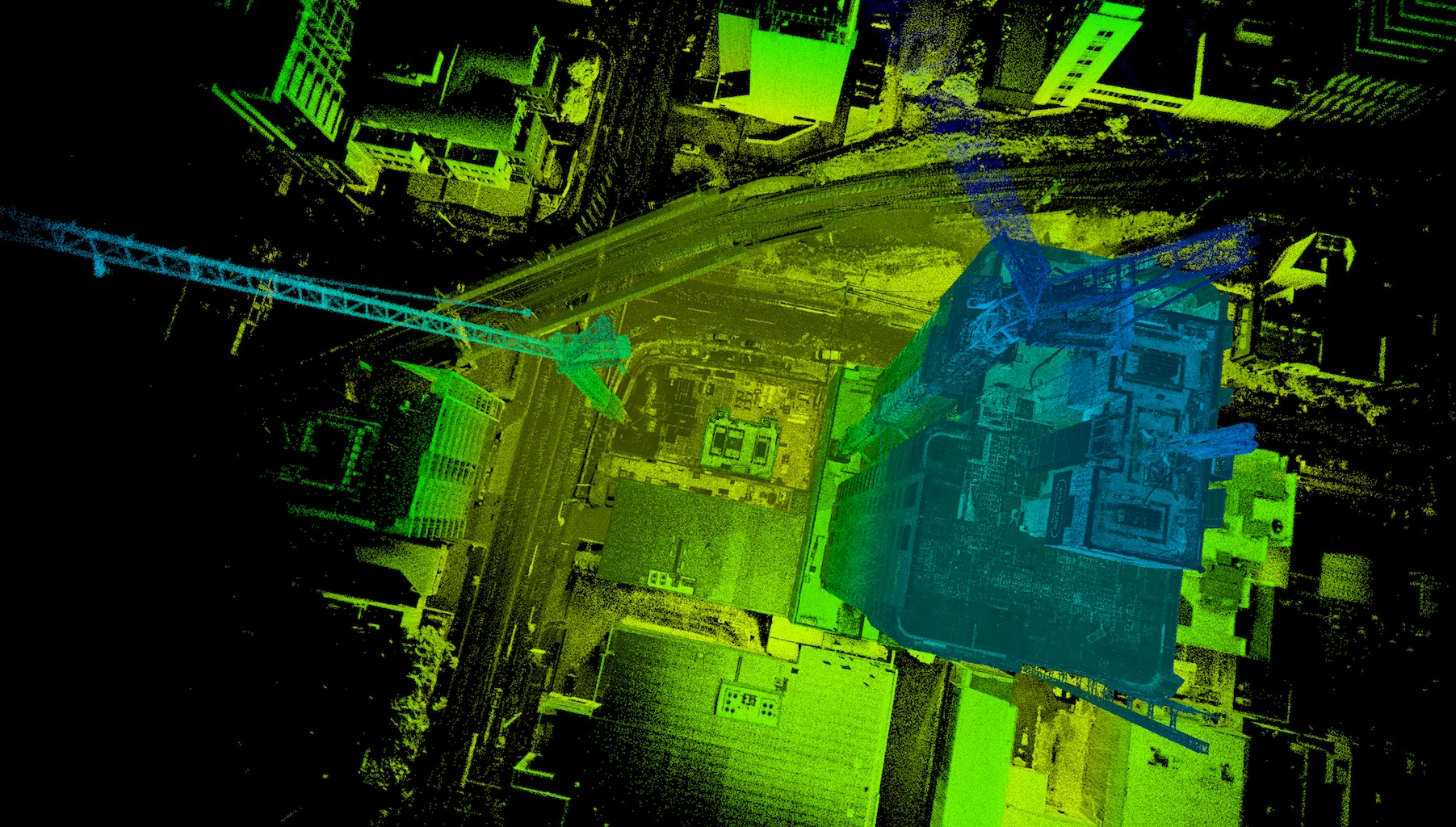
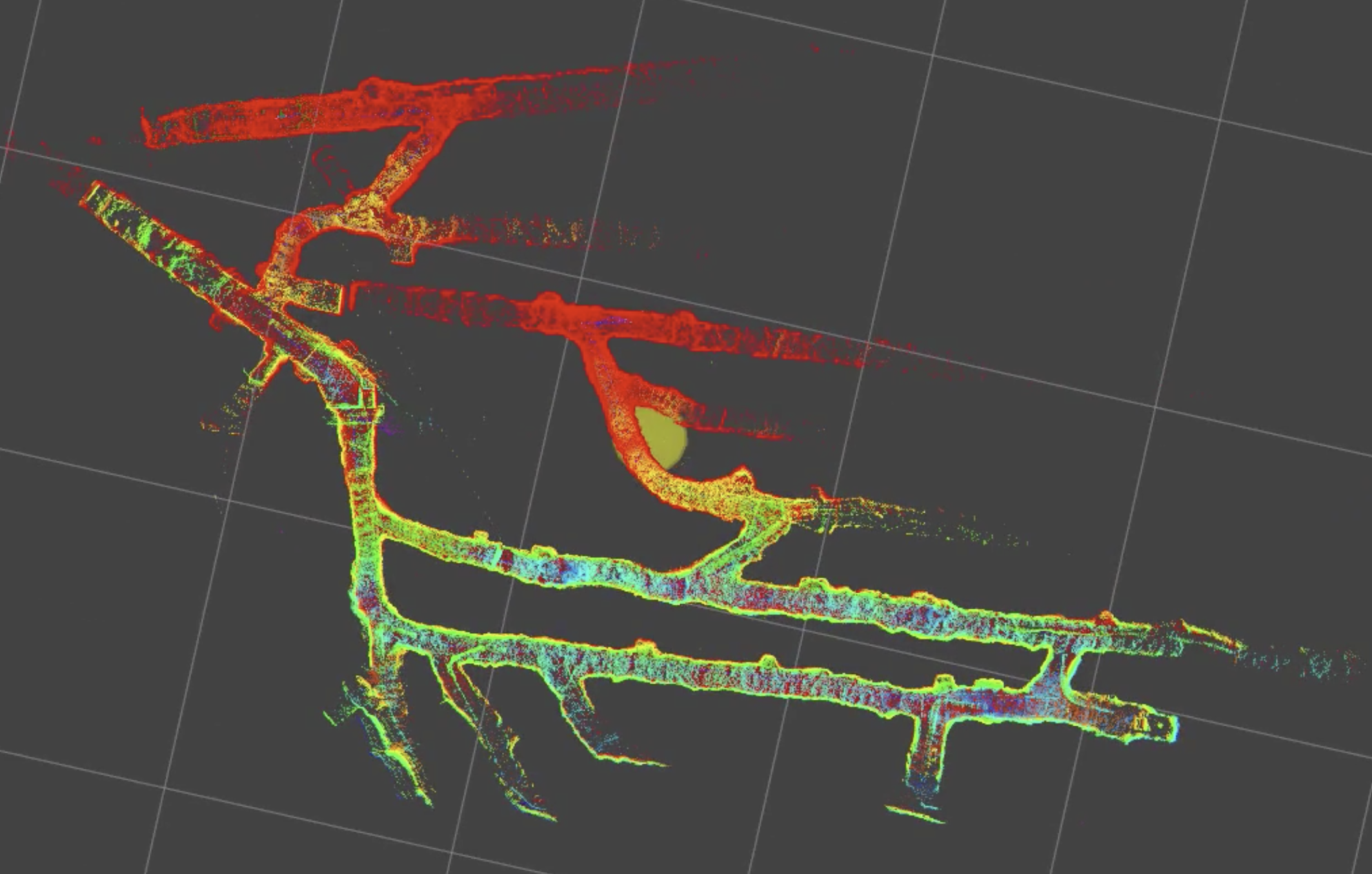
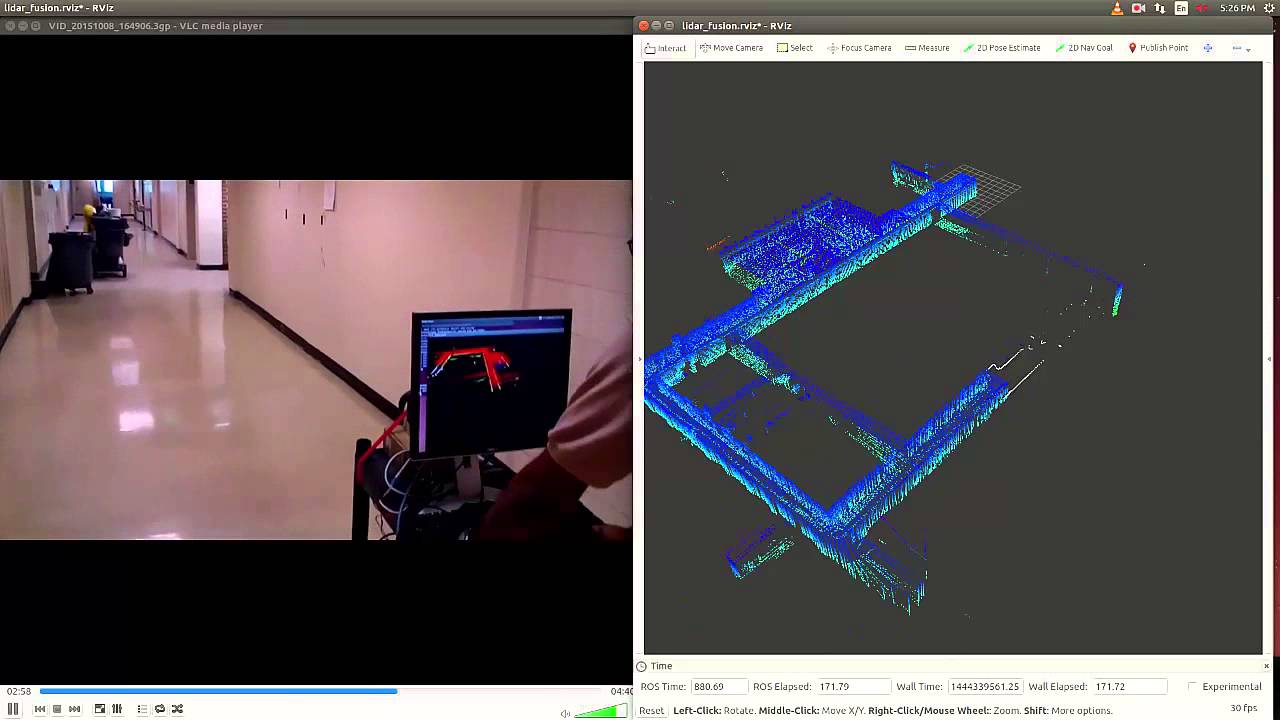
SuMa Efficient LiDARbased Semantic SLAM (Chen et al IROS 19) Tracking With Extended Kalman Filter ⭐ 374 Object (eg Pedestrian, vehicles) tracking by Extended Kalman Filter (EKF), with fused data from both lidar and radar sensors Pptk ⭐ 353. In this paper, RadarSLAM, a full radar based graph SLAM system, is proposed for reliable localization and mapping in largescale environments It is composed of pose tracking, local mapping, loop closure detection and pose graph optimization, enhanced by novel feature matching and probabilistic point cloud generation on radar images. Accumulated registered point cloud from lidar SLAM SLAM will always use several different types of sensors, and the powers and limits of various sensor types have been a major driver of new algorithms Statistical independence is the mandatory requirement to cope with metric bias and with noise in measurements.
Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB Design LidarBased SLAM Using Unreal Engine Simulation Environment Video MATLAB. Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB Design LidarBased SLAM Using Unreal Engine Simulation Environment Video MATLAB. Lidarbased SLAM There have been several research efforts tackling the SLAM problem using mobile LiDARs Bosse and Zlot used a SICK laser scanner on a spinning platform mounted on a skidsteer loader to perform SLAM in an outdoor environment A voxelsweepmatched method was used to align the point clouds and recover the sensor trajectory.
Close 93 Posted by 1 year ago Archived Interestingly, robot vacuum cleaner "lidar" are mostly (all?) based on triangulation for rangefinding, rather than time of flight or interferometric methods that self driving car lidars use. Lidarbased SLAM vs vSLAM for robot vacuums – which one is best?. Abstract Modern 3D laserrange scanners have a high data rate, making online simultaneous localization and mapping (SLAM) computationally challenging Recursive state estima tion techniques are efcient but commit to a state estimate immediately after a new scan is made, which may lead to misalignments of measurements.
Closures candidates for a 3D LiDARbased SLAM The idea of overlap has its origin in the photogrammetry and computer vision community 15 The intuition is that to successfully match two images and calculate their relative pose, the images must overlap This can be quantied by dening the overlap percentage as the percentage of pixels. LIDAR based SLAM is relatively easy to set up and it is quite precise there is a reason Waymo uses LIDARs on their selfdriving cars Did you just say "LIDAR good"?. Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB Design LidarBased SLAM Using Unreal Engine Simulation Environment Video MATLAB.
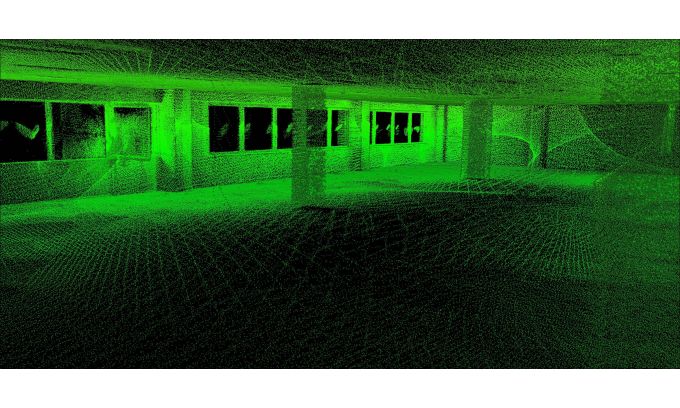
Using PX80 to generate a colorized point cloud of a complex indoor environment In the past few years, SLAMbased handheld lidar scanners have made a big entrance into the 3Dcapture market These solutions are becoming popular not simply because of their speed, low cost, or ease of use—but because the combination of these three factors has opened up entirely new use cases for 3D capture that weren’t possible with traditional methods. But of course, there is a reason that Tesla doesn’t LIDARs are bulky, quite expensive and since they have rotating parts require maintenance when in operation for longer period of time. LIDAR is an interesting and versatile sensor In many ways 2D LIDAR measurements are very similar to the measurements we used in the UTIAS dataset in my EKF SLAM tutorial As with the UTIAS dataset, the measurement model is simply the range and bearing to the measured landmark or obstacle.
The indoor LiDARbased SLAM dataset consists of three scenes captured by multibeam laser scanners in indoor environments with various complexity The original scan frame data from scanners are provided Users can test their LiDAR SLAM algorithm on these data We provide two ways of evaluation as follows. Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB Design LidarBased SLAM Using Unreal Engine Simulation Environment Video MATLAB. LiDARbased Simultaneous Localization And Mapping (SLAM), which provides environmental information for autonomous vehicles by map building, is a major challenge for autonomous driving In addition, the semantic information has been used for the LiDARbased SLAM with the advent of deep neural networkbased semantic segmentation algorithms.
LiDAR based SLAM is mainly based on scanmatching approaches such as ICP Such algorithms have remained almost the same since its their invention thirty years ago Some experiments have been done to couple both LiDAR and visual sensors, but all of them remain at a very loose fusion level. Moosmann and Stiller used a Velodyne Lidarbased SLAM to estimate the vehicle trajectory without using wheel speed sensors or other information Tsai developed a featurebased realtime monocular SLAM with a small camera However, these works have mainly focused on the odometry aspect instead of the mapping aspect, and as a result, the generated point clouds tend to be noisy and have low resolutions. Record and visualize synthetic lidar sensor data from the Unreal Engine® simulation environment Then develop a perception algorithm to build a map using SLA.
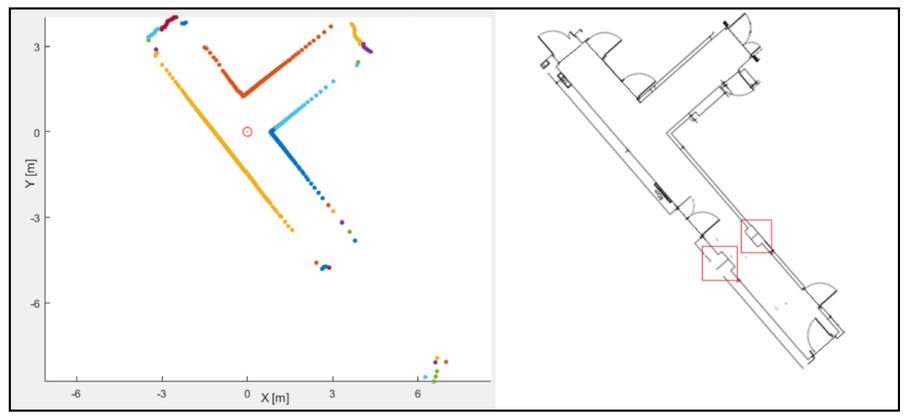
Close 93 Posted by 1 year ago Archived Interestingly, robot vacuum cleaner "lidar" are mostly (all?) based on triangulation for rangefinding, rather than time of flight or interferometric methods that self driving car lidars use. This article presents a SLAM system based on data recorded by a 2D LiDAR To fuse information concerning the platform’s location and its surroundings, a variant of Kalman filter together with an Iterated Closest Points (ICP) algorithm were applied. In this context, Simultaneous Localization and Mapping (SLAM) is a very wellsuited solution SLAM is used for many applications including mobile robotics, selfdriving cars, unmanned aerial vehicles, or auto A Review of VisualLiDAR Fusion based Simultaneous Localization and Mapping Sensors (Basel).
Solutions to the SLAM problem using Light Detection and Ranging (LiDAR), but these algorithms require a high computational cost However, certain environments with a specific structure allow the use of more simplified algorithms Specifically, this paper shows a SLAM algorithm where only the LiDAR signal is used and vertical planes are taken as. In this work, a 3D lidarbased SLAM approach, named GPSLAM, is designed to address those challenges above We use regionalized GP map reconstruction to model the environment from range data, which serves as the fundamental of our approach After this, evenly distributed samples are drawn from the model and fed into a scantomap registration. SLAM and Autonomy, Together at Last Perhaps the most noteworthy feature of Hovermap is that it uses SLAM technology to perform both autonomous navigation and mapping It’s rare to see SLAM used for both purposes, Dr Hrabar tells me, but since CSIRO and DATA61 have experience in drone autonomy and lidarbased SLAM, the developers were able to integrate these two functions so they work in.
Globally Consistent SLAM With LIDAR;. Record and visualize synthetic lidar sensor data from the Unreal Engine simulation environment Then develop a perception algorithm to build a map using SLAM in MATLAB Design LidarBased SLAM Using Unreal Engine Simulation Environment Video MATLAB. The indoor LiDARbased SLAM dataset consists of three scenes captured by multibeam laser scanners in indoor environments with various complexity The original scan frame data from scanners are provided Users can test their LiDAR SLAM algorithm on these data We provide two ways of evaluation as follows.
LIDAR based 3D SLAM for autonomous vehicles Find more about using LiDar to get 3D point cloud for 3D scene construction LIDAR was originated from the idea behind Sonar ( sound navigation and ranging ) that was built upon the idea of using echolocation inspired by some marine animals and bats as well. It is based on 3D Graph SLAM with NDT scan matchingbased odometry estimation and loop detection It also supports several graph constraints, such as GPS, IMU acceleration (gravity vector), IMU orientation (magnetic sensor), and floor plane (detected in a point cloud). SLAM and Autonomy, Together at Last Perhaps the most noteworthy feature of Hovermap is that it uses SLAM technology to perform both autonomous navigation and mapping It’s rare to see SLAM used for both purposes, Dr Hrabar tells me, but since CSIRO and DATA61 have experience in drone autonomy and lidarbased SLAM, the developers were able to integrate these two functions so they work in.
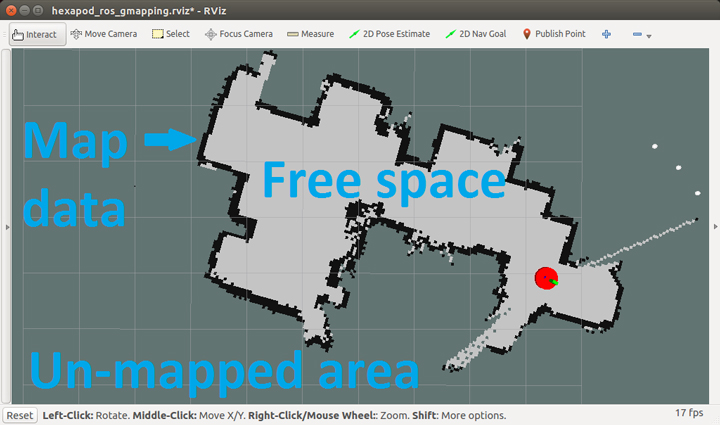
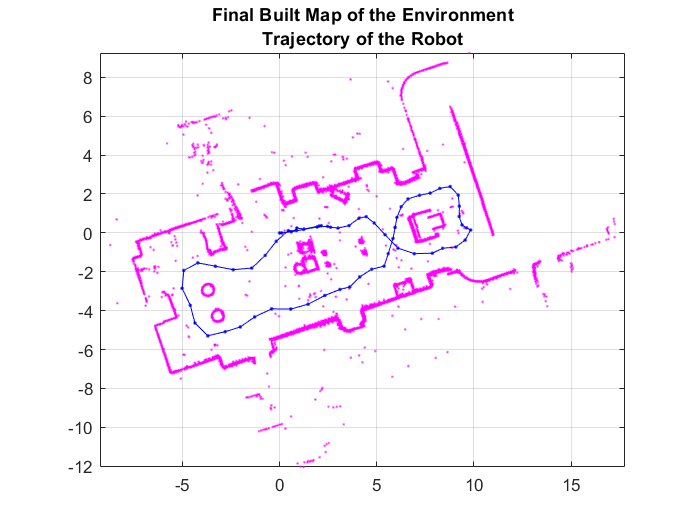
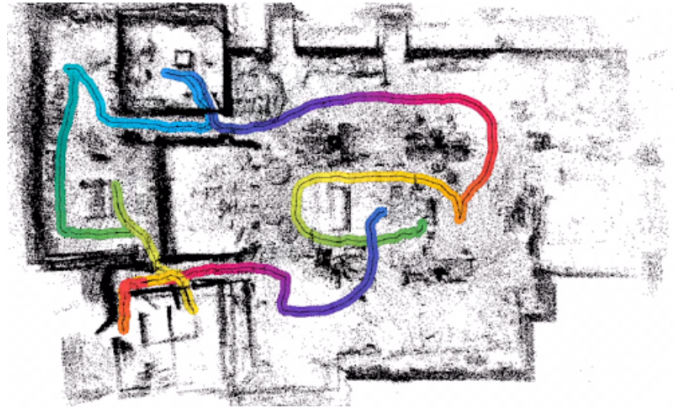
Fig 2 A map built using the R2D LiDAR sensor The picture above 'A map built using the R2D LiDAR sensor' shows just such a map built using the SLAM process. I have been using ROS for performing SLAM with lidarbased algorithms, eg, gmapping, hector, and cartographer Also, I have used ORB slam for performing slam using the monucular camera attached to my robot My question is is there any known method within ROS community which allows the fusion of monocular camera lidar data for performing SLAM?.

Experiment 4 Trajectory Of Lidar Based Graph Slam In Dense Urban Area Download Scientific Diagram
Imaginghub Blog Lidar Based 3d Slam For Autonomous Vehicles
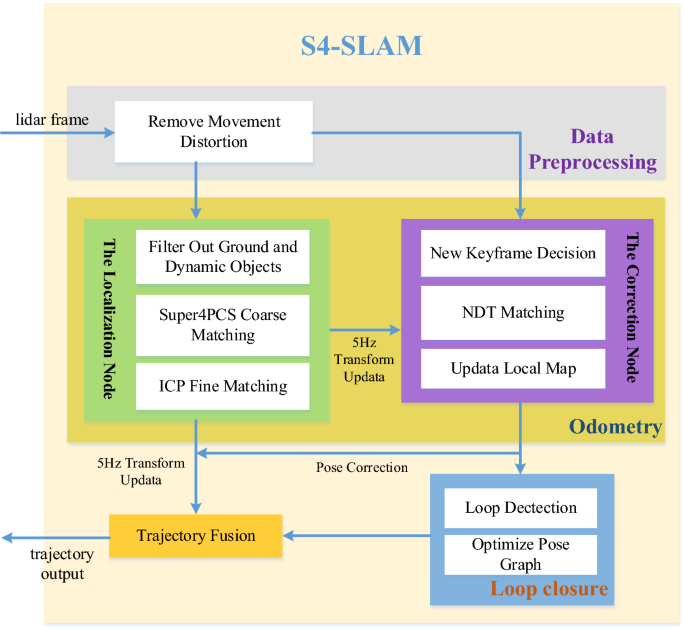
S4 Slam A Real Time 3d Lidar Slam System For Ground Watersurface Multi Scene Outdoor Applications Springerlink
Lidar Based Slam のギャラリー

Efficient Continuous Time Slam For 3d Lidar Based Online Mapping Deepai

Imaginghub Blog Lidar Based 3d Slam For Autonomous Vehicles
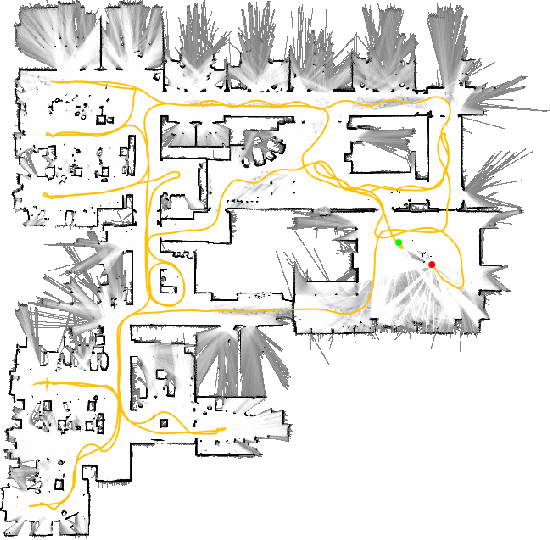
Figure 5 From Real Time Loop Closure In 2d Lidar Slam Semantic Scholar

Lidar Based Simultaneous Localization And Mapping Slam
Visual Slam Gps Denied Landscapes Vslam 101 Inertial Sense

Pdf Suma Efficient Lidar Based Semantic Slam

Rp Lidar Low Cost 5hz 360 Deg Lidar Robopeak

Real Time Slam For Mms Positioning Extraction Of A 2d Scan From The Download Scientific Diagram
Lidar Based Slam And Localization For Autonomous Ferry
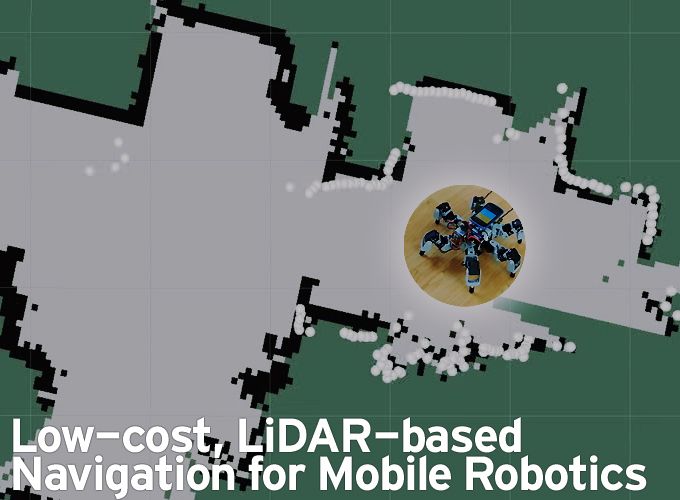
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow
How Slam Technology Can Support New Build Projects Geo4construction
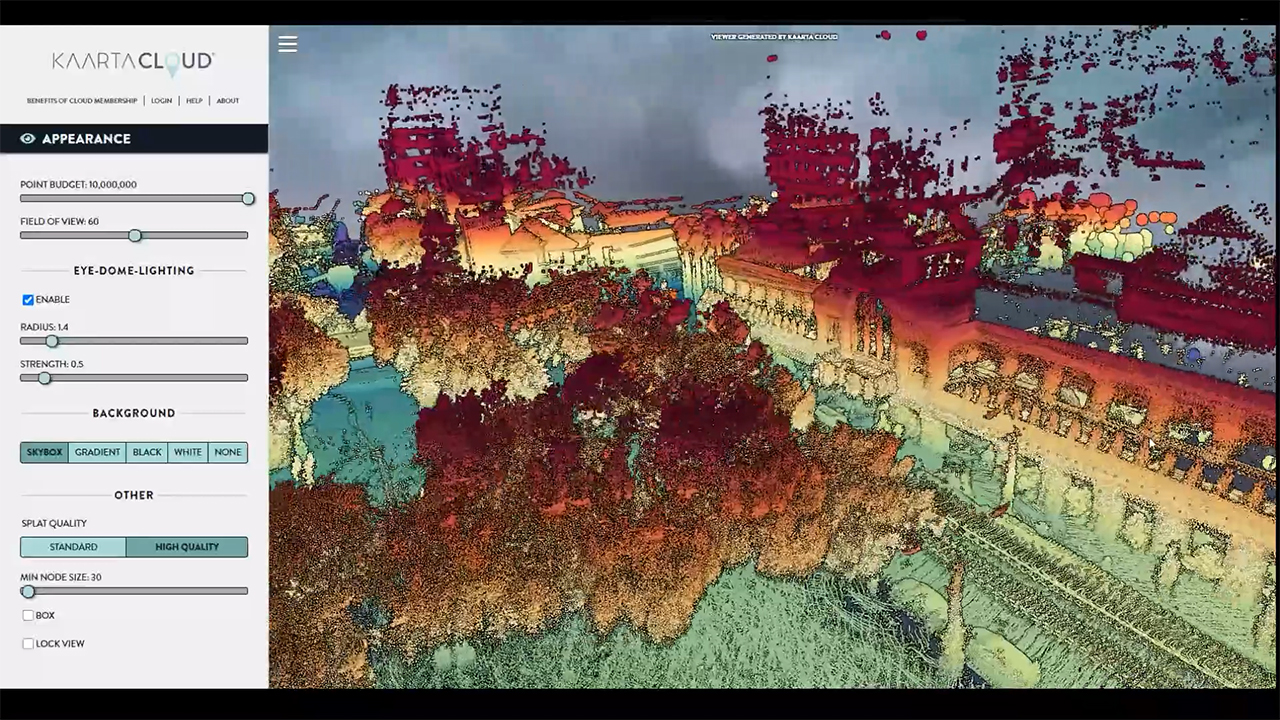
Velodyne Lidar With Kaarta Cloud Can Produce Stunning 3d Maps Business Wire
Lidar Slam Positioning Quality Evaluation In Urban Road Traffic Springerlink
Kudan And Ouster Announce Partnership To Develop Lidar Based Localization And Mapping Solutions Kudan Global
Hovermap Powerful Slam For Drone Autonomy And Lidar Mapping Spar 3d

Overlapnet Loop Closing For Lidar Based Slam Robotics Science And Systems
Lidar Mapping With Ouster 3d Sensors Ouster

Innoviz Lidar Based Slam
Low Cost Lidar Based Navigation For Mobile Robotics Roboticstomorrow
Lidar Based Slam Implementation Using Kalman Filter

Experiment 2 Trajectory Of Lidar Based Graph Slam In Sparse Area With Download Scientific Diagram
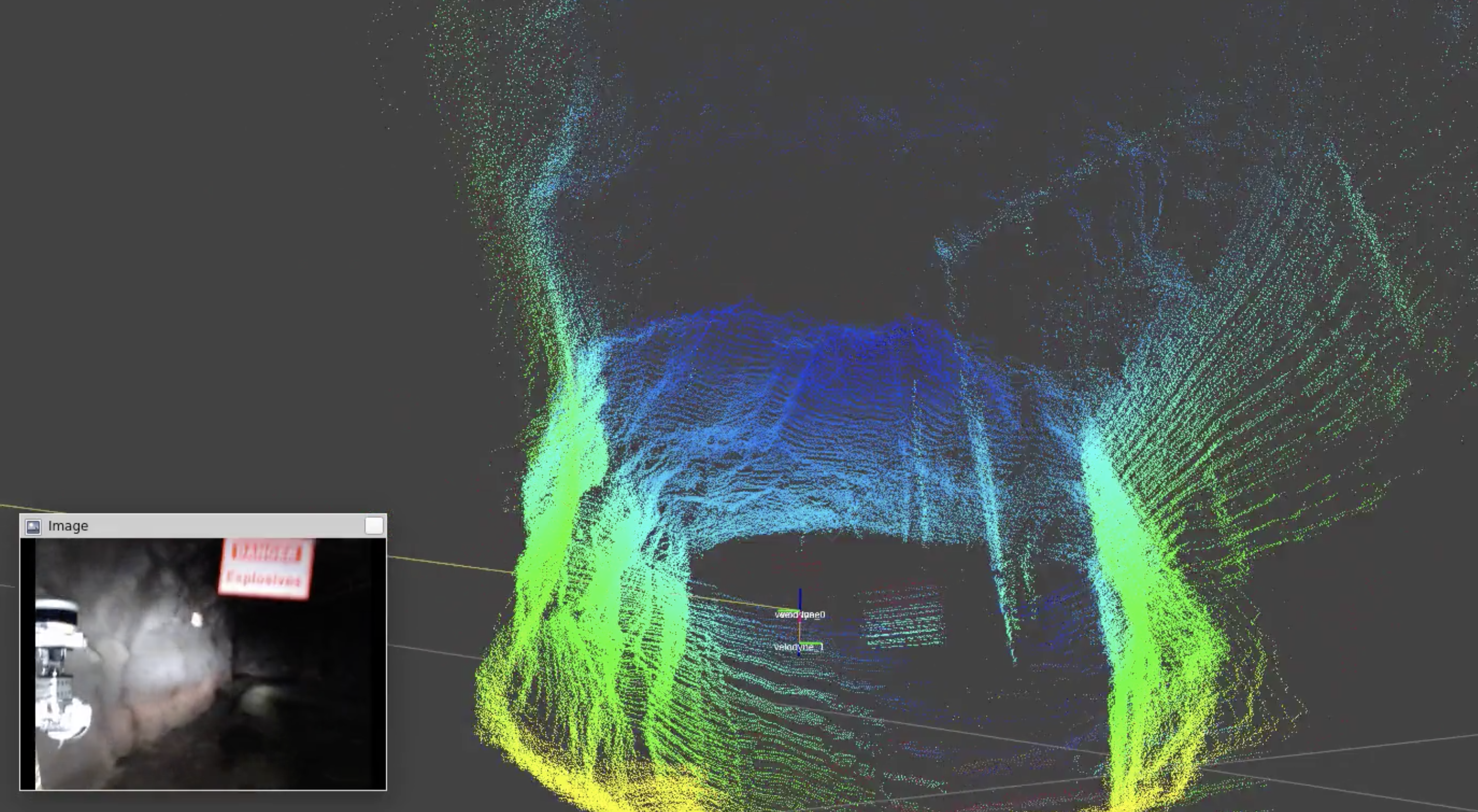
Applanix News Applanix Delivers Inertial Navigation System For Fully Gnss Denied Subterranean Environments

Slam Based Mapping In The Scan

Gp Slam Real Time 3d Lidar Slam Based On Improved Regionalized Gaussian Process Map Reconstruction Deepai
Ece 5725 Final Project

Rss Overlapnet Loop Closing For Lidar Based Slam By X Chen Et Al دیدئو Dideo
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
Semantic Suma

Lidar Slam Robot Car Ros 01

Overview Of Vision And Lidar Fusion Slam Latest Programmer Sought

Inspiring Roboticist About Brief Survey Of Position Estimation Systems 9 Mins Position Estimator Survey Jpg I Am Starting A New Project And I Was Wondering What Would Be The Appropriate Position Estimation System To Use I Have Used A Couple Over The Years
Sensors Free Full Text 3d Lidar Based Precision Vehicle Localization With Movable Region Constraints Html
Robot Perception Group
Sensors Free Full Text Robust Gicp Based 3d Lidar Slam For Underground Mining Environment
Electronics Free Full Text Large Scale Outdoor Slam Based On 2d Lidar Html

How Surveyors Should Use 3d Lidar Based Slam In 21
Lidar Based Slam Implementation Using Kalman Filter
Consistent Map Building In Petrochemical Complexes For Firefighter Robots Using Slam Based On Gps And Lidar Robomech Journal Full Text

Overview Of Vision And Lidar Fusion Slam Latest Programmer Sought

Veloview Lidar Slam Capabilities Kitware Blog
Jrm Vol 28 P 479 16 Fuji Technology Press Academic Journal Publisher

3d Mapping With Graph Slam Using Lidar In Ros2 By Ryohei Sasaki Medium
What Is Different Rgbd Slam Vs Rtab Map Slam Ros Answers Open Source Q A Forum

Lidar Startup Ouster Raises 60 Million In Production Run Up Techcrunch
Lidar Integration With Ros Quickstart Guide And Projects Ideas
Usage The Newer College Dataset
Real Time Lidar For 3d Mapping With Slam Youtube

Figure 1 From Robust Slam System Based On Monocular Vision And Lidar For Robotic Urban Search And Rescue Semantic Scholar

Rss Overlapnet Loop Closing For Lidar Based Slam By X Chen Et Al Youtube
Lidar Slam Positioning Quality Evaluation In Urban Road Traffic Springerlink

Digitally Recreating Reality With Lidar Amp Slam

Google Releases Slam Tool Cartographer To Open Source Community
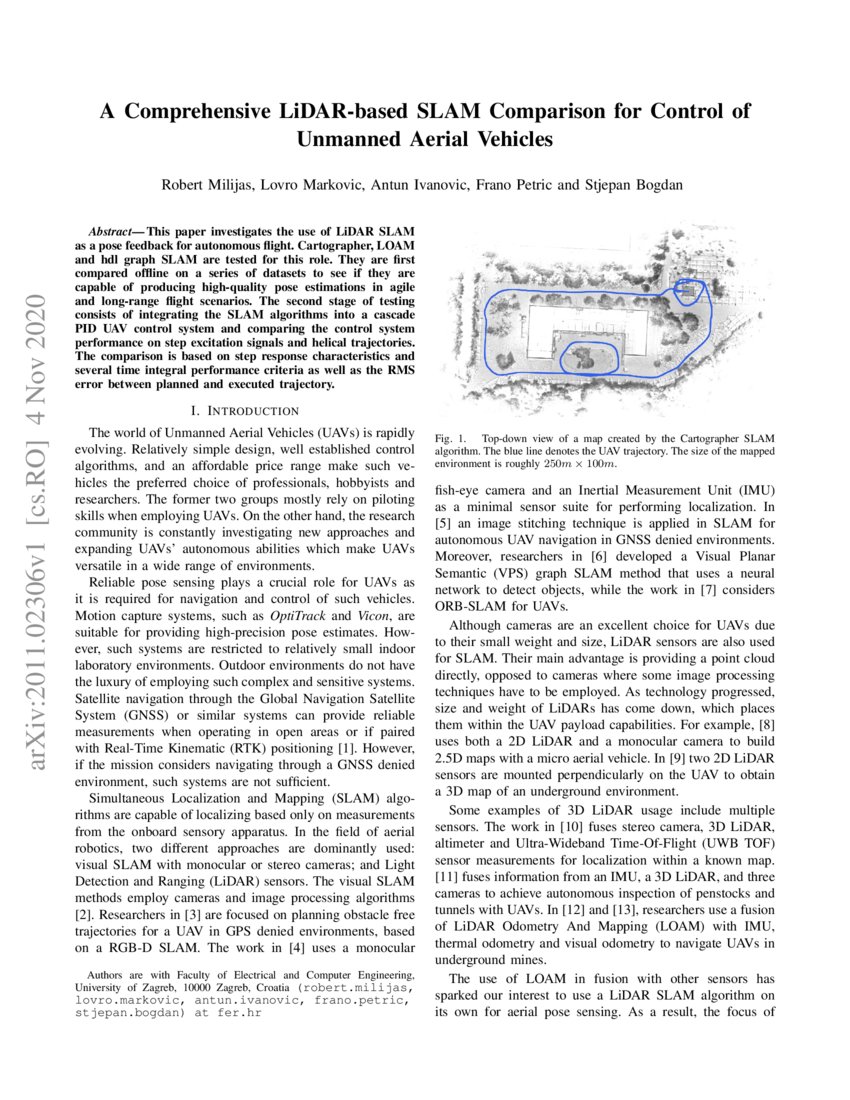
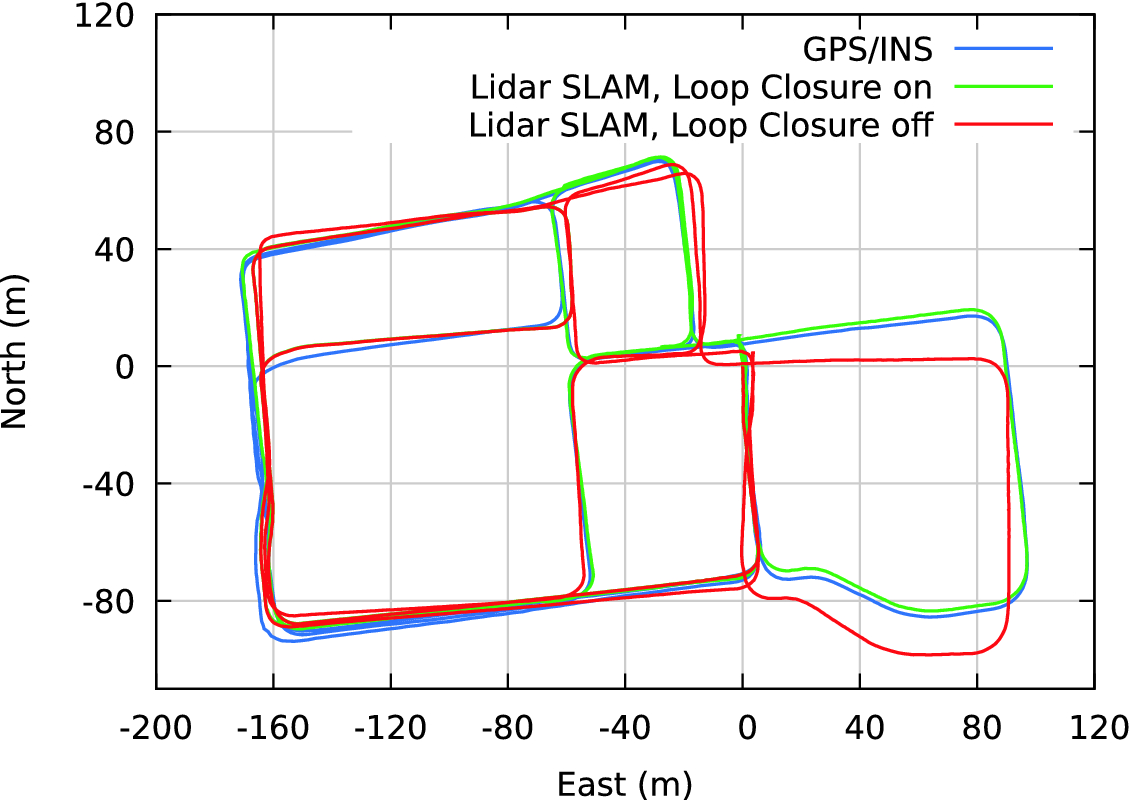
A Comprehensive Lidar Based Slam Comparison For Control Of Unmanned Aerial Vehicles Deepai
Lidar Based Slam Path Tracking In Ros With Rplidar A1 Youtube
How Surveyors Should Use 3d Lidar Based Slam In 21

Veloview Lidar Slam Capabilities Kitware Blog
In Practical Terms How Close Is The Accuracy Of Camera Based Visual Odometry Slam Methods To Lidar Based Methods For Autonomous Car Navigation Robotics Stack Exchange
Sensors Free Full Text 3d Lidar Based Precision Vehicle Localization With Movable Region Constraints Html
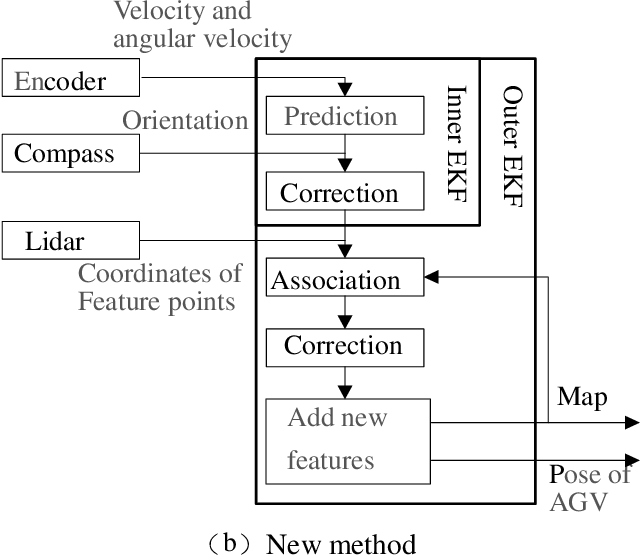
Pdf A New Ekf Slam Algorithm Of Lidar Based Agv Fused With Bearing Information Semantic Scholar

A Cross Correction Lidar Slam Method For High Accuracy 2d Mapping Of Problematic Scenario Sciencedirect
Lidar Inertial Slam On Ros2 Introduction By Ryohei Sasaki Medium
Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink
What S The Difference Between Slam Algorithms For Handheld Lidar Geo4construction

An Online Solution Of Lidar Scan Matching Aided Inertial Navigation System For Indoor Mobile Mapping
Lidar Based Slam Implementation Using Kalman Filter
Lidar Based Slam Implementation Using Kalman Filter
How Multi Beam Flash Lidar Works Ouster

Overlapnet Loop Closing For Lidar Based Slam Robotics Science And Systems
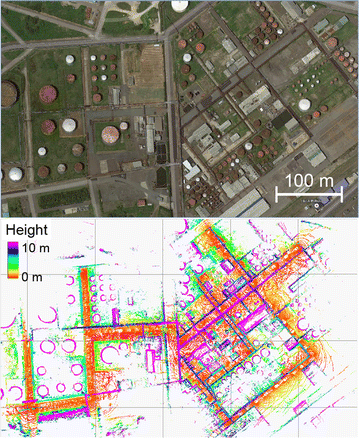
Consistent Map Building In Petrochemical Complexes For Firefighter Robots Using Slam Based On Gps And Lidar Robomech Journal Full Text
Google Releases Lidar Slam Algorithms Teases Innovative Mapping Solution Spar 3d

Efficient Continuous Time Slam For 3d Lidar Based Online Mapping Youtube
Feature Article Products Related To Slam Technology Visual Slam Lidar Slam Tegakari An Information Transmission Media For Research And Development
Applanix News Applanix Delivers Inertial Navigation System For Fully Gnss Denied Subterranean Environments

Implement Simultaneous Localization And Mapping Slam With Lidar Scans Matlab Simulink

Slam Matlab Simulink Mathworks America Latina



